

Five-degree-of-freedom robot tail end transmission mechanism
A transmission mechanism and robot technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of increasing the difficulty of robots and increasing the size of the end of robots, and achieve the effect of ensuring compactness, flexible rotation, and accurate and reliable transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
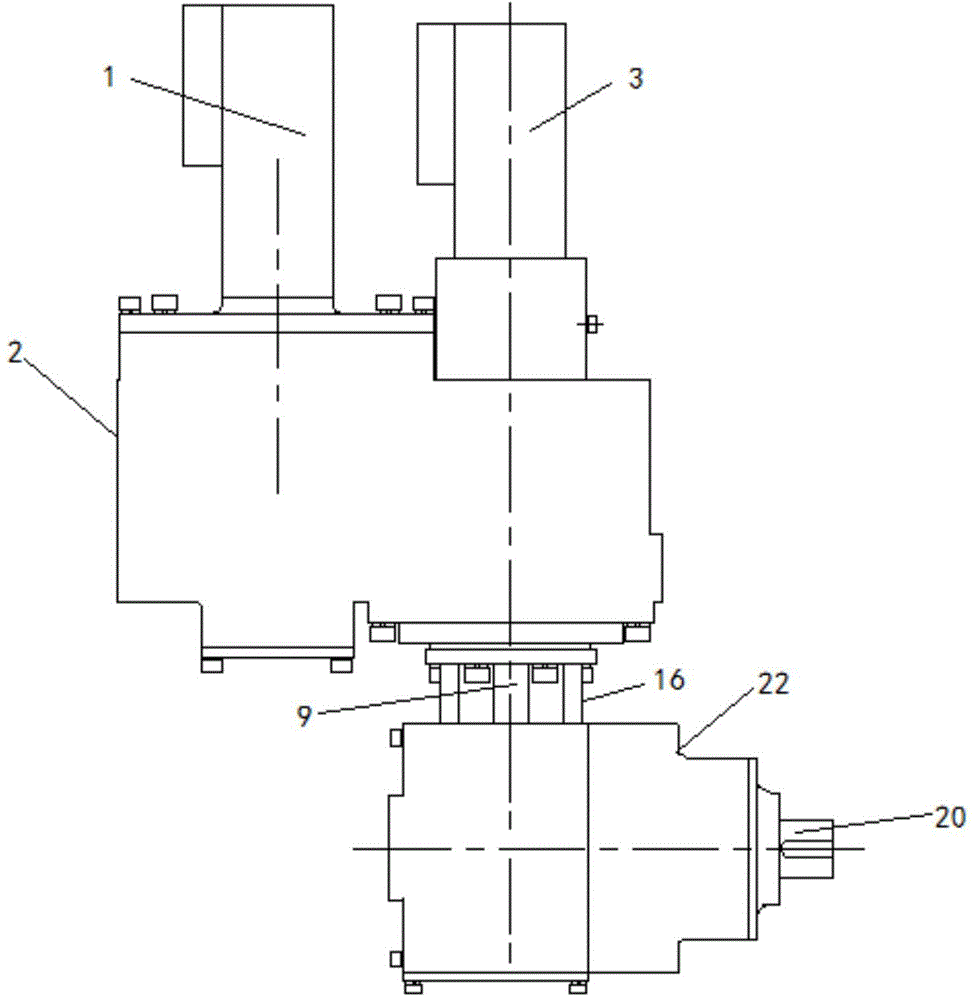
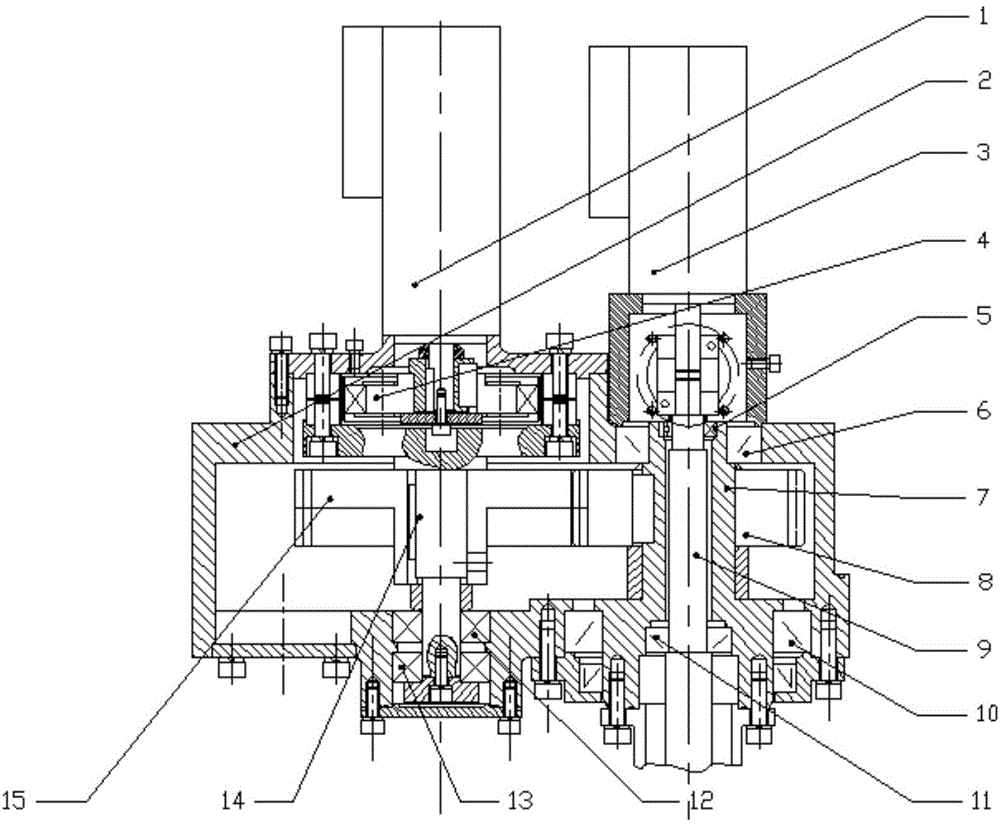
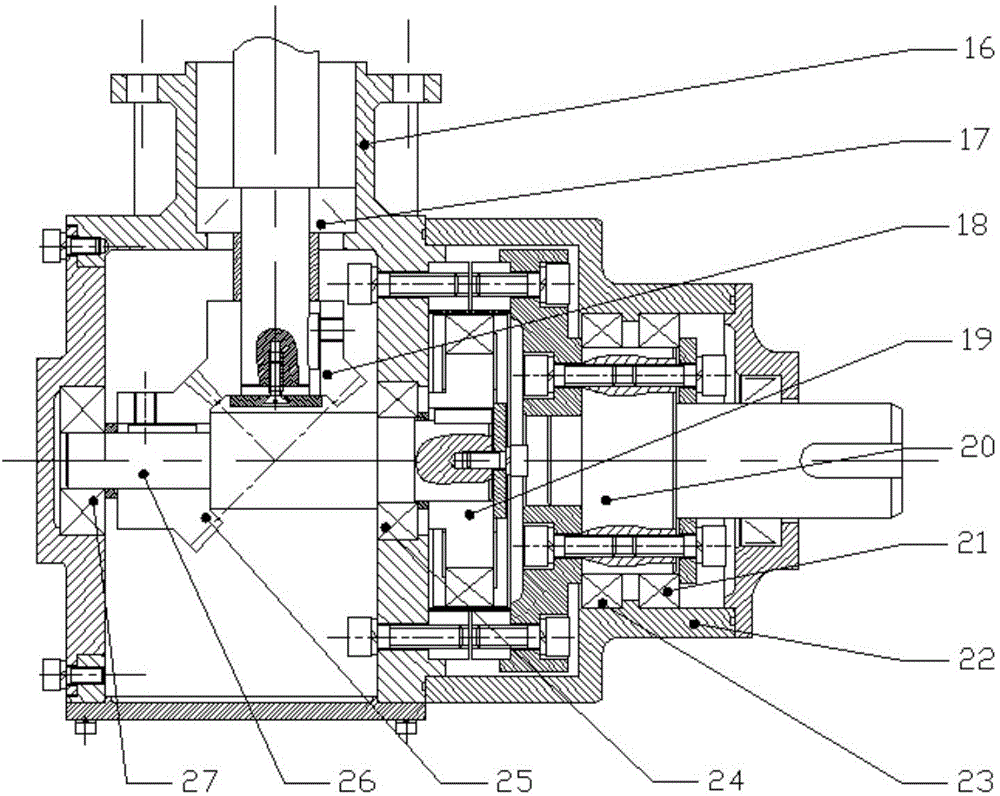
[0023] like figure 1 and figure 2 As shown, this embodiment provides a five-degree-of-freedom robot terminal transmission mechanism, including: a first servo motor 1, a box shell 2, a second servo motor 3, a first harmonic reducer 4, a hollow transmission shaft 7, and a Driven spur gear 8, drive shaft 9, harmonic output end 14, drive spur gear 15, bevel gear set housing 16, drive bevel gear 18, second harmonic reducer 19, terminal output shaft 20, terminal harmonic housing 22, Driven bevel gear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More