

Biped robot lower limb mechanism driven hydraulically
A bipedal robot and lower limb technology, applied in the field of robotics, can solve the problems of small load capacity, low specific power, poor anti-interference, etc., and achieve the effects of strong walking ability, strong load-bearing capacity and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
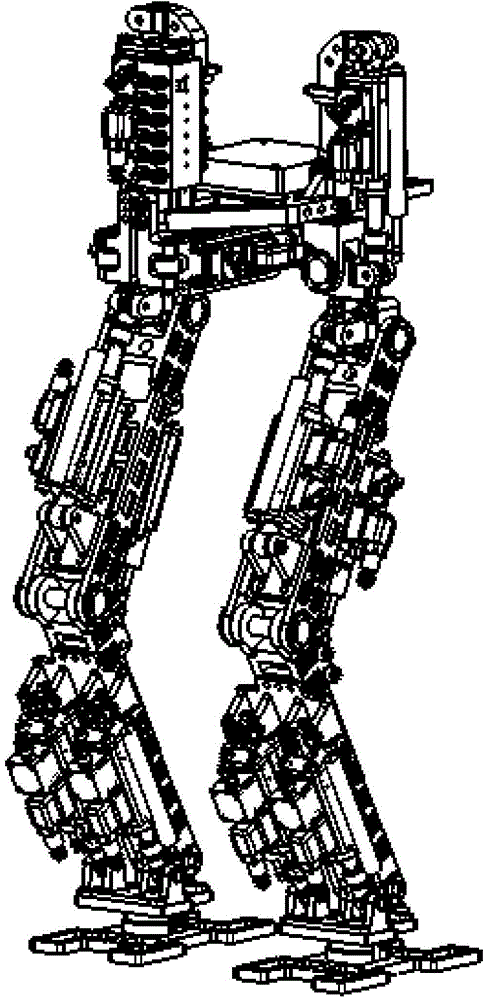
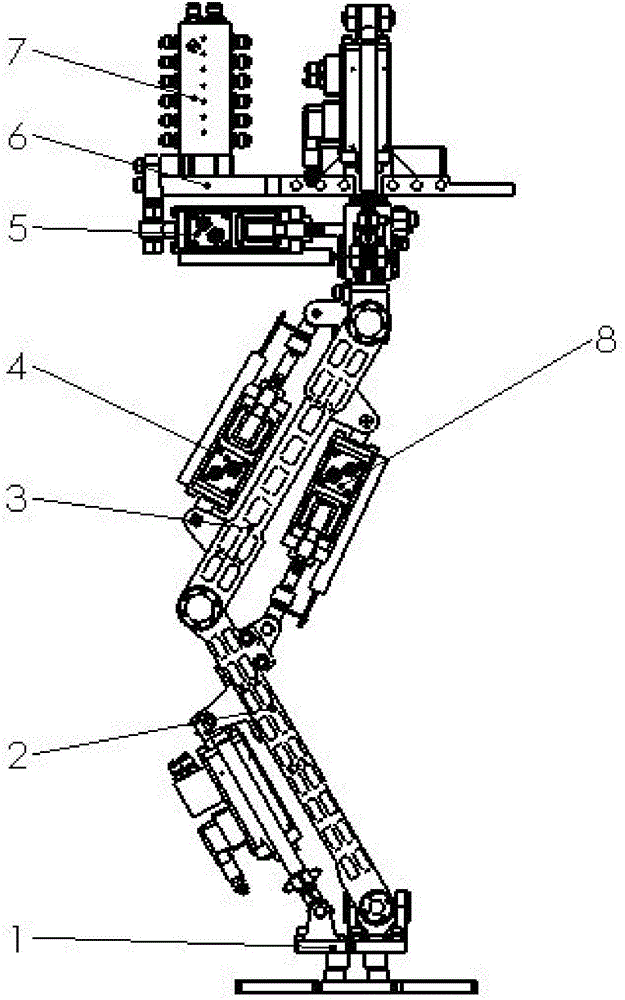
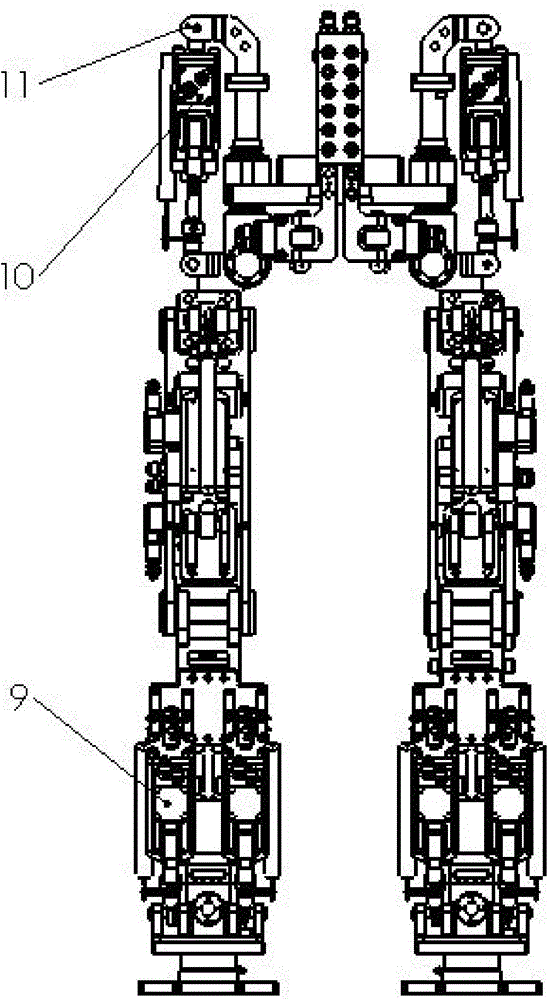
[0009] Specific implementation mode one: combine figure 1 , figure 2 , image 3 and Figure 5 Describe this embodiment, a hydraulically driven biped robot lower limb mechanism described in this embodiment includes a torso 6, an oil separator 7, a left leg and a right leg, and the oil separator 7 is installed on the upper surface of the torso 6. The left leg and the right leg are installed side by side on the lower surface of the torso 6. The left leg and the right leg have the same structure. Torsion hydraulic cylinder servo unit 5, hip joint, knee joint forward swing hydraulic cylinder servo unit 8, ankle joint, two ankle joint hydraulic cylinder servo units 9, hip joint side swing hydraulic cylinder servo unit 10 and trunk upper end swing connector 11, The upper end of the thigh 3 is connected to the trunk 6 through the hip joint, the lower end of the thigh 3 is connected to the upper end of the calf 2, the lower end of the calf 2 is connected to the foot 1, and the uppe...
specific Embodiment approach 2
[0011] Specific implementation mode two: combination Figure 7 Describe this embodiment, the foot 1 of a hydraulically driven biped robot lower limb mechanism in this embodiment is composed of the upper end 24 of the foot, the six-dimensional force sensor 25 of the foot, and the lower end 26 of the foot sequentially connected from top to bottom. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0012] Specific implementation mode three: combination Figure 4 Describe this embodiment, the hip joint of a hydraulically driven biped robot lower limb mechanism described in this embodiment includes a hip joint rotation connector 12, a side swing bearing cap 13, a hip joint three-axis connector 14, and a front swing upper end of the hip joint. The connecting piece 15 and the hip joint forward swing bearing cap 16, the hip joint rotating connecting piece 12 is installed on the lower surface of the trunk 6, the hip joint rotating connecting piece 12 is connected with the hip joint front swinging upper end connecting piece 15 through the hip joint triaxial connecting piece 14 Connection, the hip joint front swing upper end connecting piece 15 is connected with the upper end of the hip joint forward swing hydraulic servo unit 4, the hip joint front swing upper end connecting piece 15 is connected with the upper end of the thigh 3, and the side swing bearing cover 13 is buckled o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More