

Touch sensor, touch sensing system and intelligent robot
A tactile sensor and robot technology, applied in general control systems, control/adjustment systems, instruments, etc., can solve the problems of single surface material, inconvenient installation, and inability to sense touch of robots, and achieve flexible and changeable shapes, thin thickness, and easy installation Simple and convenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
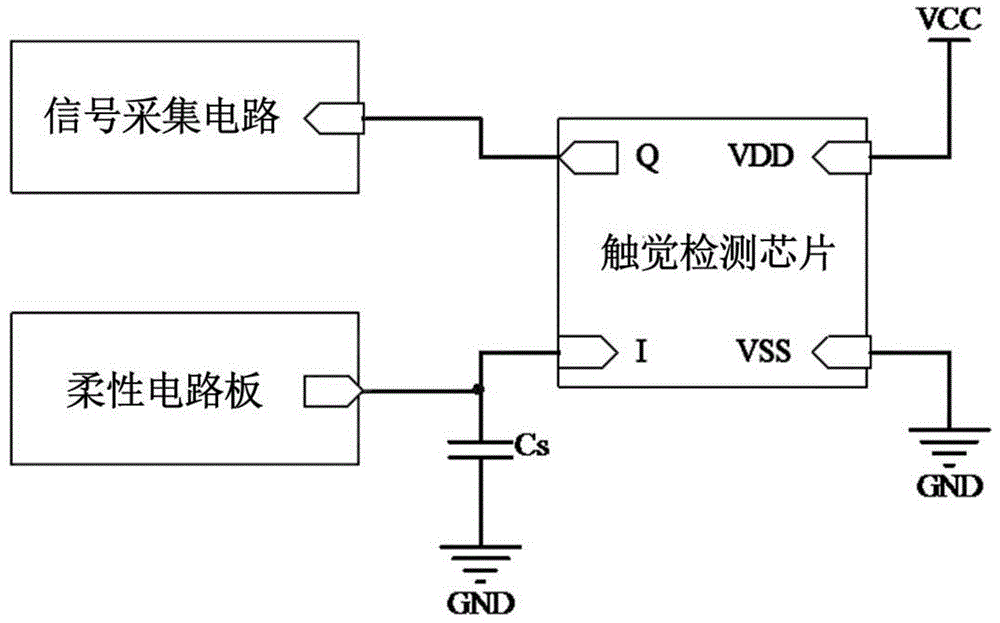
[0021] like figure 1 As shown, an embodiment of the present invention provides a tactile sensor used on a robot, including a tactile detection chip, a signal acquisition circuit and a flexible circuit board. The VSS pin of the tactile detection chip is grounded, and the VDD pin is connected to the power supply; the Q pin is the signal output terminal, which is connected to the signal acquisition circuit for signal acquisition by the host computer; the I pin is the signal acquisition terminal, and is used as a tactile sensation carrier. The flexible circuit board connection is used to receive tactile sensing signals.
[0022] As an improvement, a parallel capacitor can be connected to the signal collection end of the tactile detection chip to adjust the sensing sensitivity of the tactile sensor. The capacitance of the parallel capacitor can be 0-50pF, the lower the capacitance, the higher the sensitivity, and the most sensitive state is when the parallel capacitor is not conne...
Embodiment 2
[0027] The present invention can be well applied to the display robot. The display robot is a multi-functional intelligent robot, which is used for publicity and guidance in various exhibition sites, stadiums and science and technology halls. It has functions such as walking, automatic navigation, shielding, and talking with people. However, because its outer casing is mostly made of plastic or glass fiber reinforced plastic, it is difficult to achieve tactile functions in the past.
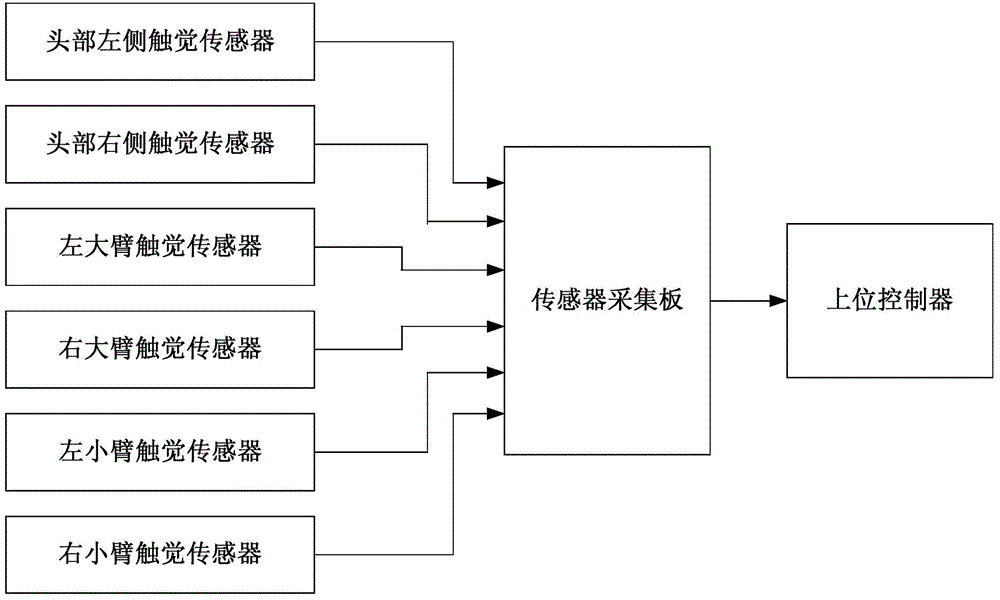
[0028] An embodiment of the present invention provides a display robot, including a robot body and a tactile sensing system. like image 3 As shown, the tactile sensing system includes a host controller, a sensor acquisition board and a plurality of tactile sensors; the plurality of tactile sensors are respectively connected with the sensor acquisition board, and the sensor acquisition board is connected with the host controller.
[0029] Specifically, the plurality of tactile sensors are respe...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Capacitance | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More