

Fast tracking recognition method for overlapped fruits by picking robot
A technology for picking robots and identification methods, which is applied in the field of fast tracking and identification of spherical overlapping fruits, can solve problems such as affecting the tracking and identification of robots, and achieve the effects of improving real-time performance, short running time and reducing workload.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
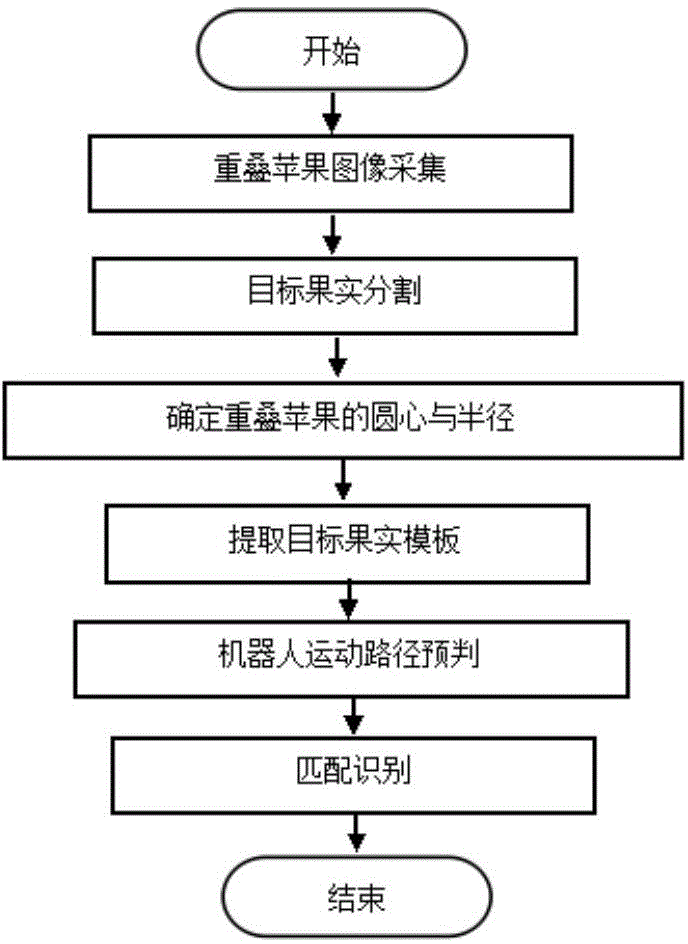
[0034] The specific embodiments of the present invention will be further described below in conjunction with the drawings. The specific process of the present invention is as follows: figure 1 Shown.
[0035] 1. Overlapping apple image collection
[0036] The invention adopts a color CCD camera to continuously collect images, and the collection frequency is 10 frames / second. The images are continuously collected during the movement of the robot, and the latest 10 overlapping apple images are used.
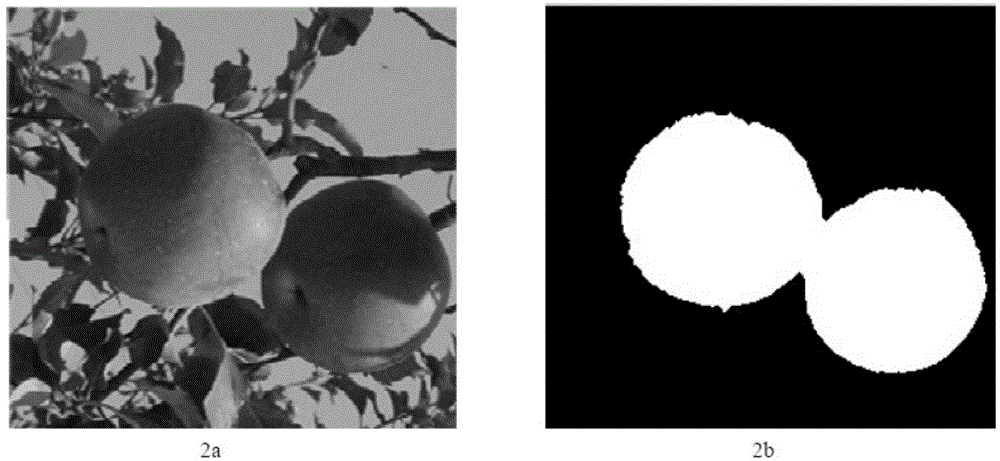
[0037] 2. Target fruit segmentation
[0038] In this embodiment, the OTSU segmentation method based on color features is used to segment the collected image, that is, the R component under the RGB color model is subtracted from the G component. There are holes, burrs, noise, etc. in the segmented image, so mathematical morphology is used to perfect the segmented image. The specific method is to first use a disc-shaped structural element with a radius of 1 pixel to expand the image, expan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More