

Hydraulic-driven multi-joint industrial robot
An industrial robot and multi-joint technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as small load/weight ratio, complex topology, and flexible workspace to be improved, and achieve the effect of large self-weight ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
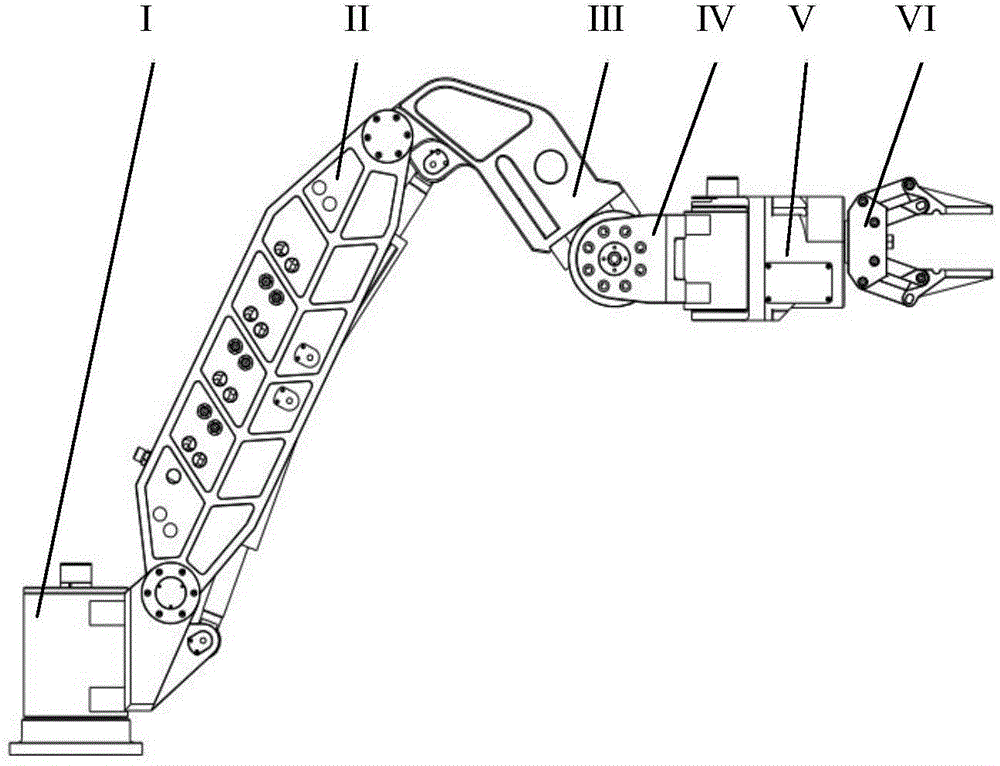
[0034] Hydraulic drive multi-joint industrial robot of the present invention, as figure 1 As shown, it includes six connecting rod components connected in sequence and a hydraulic control component VII. The six link parts are link part I, link part II, link part III, link part IV, link part V and link part VI.
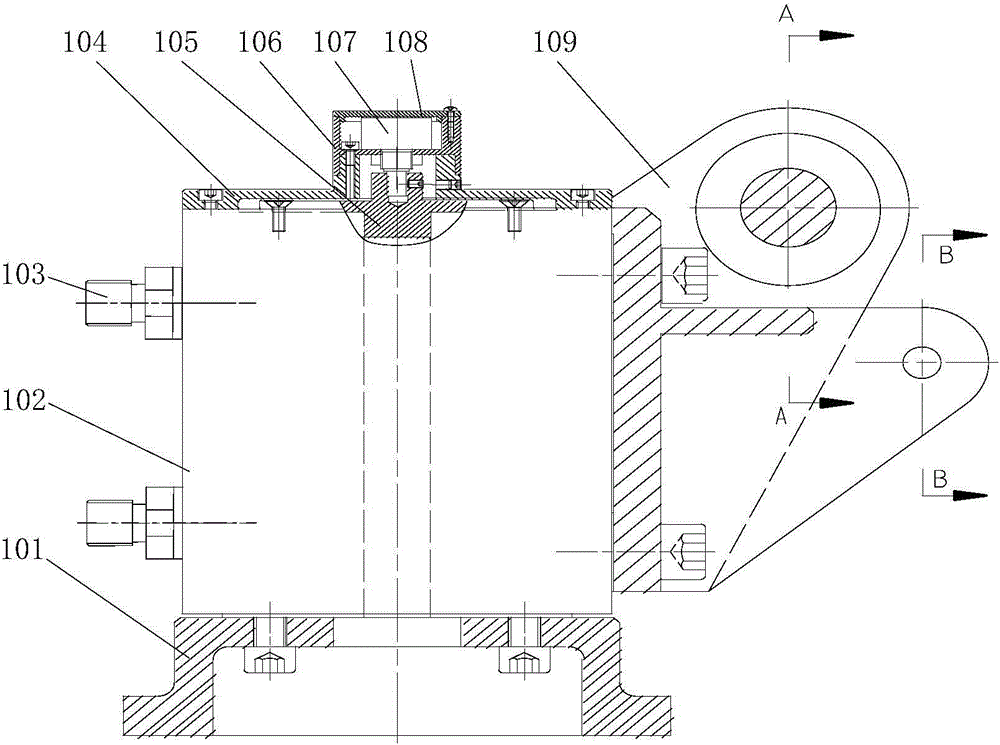
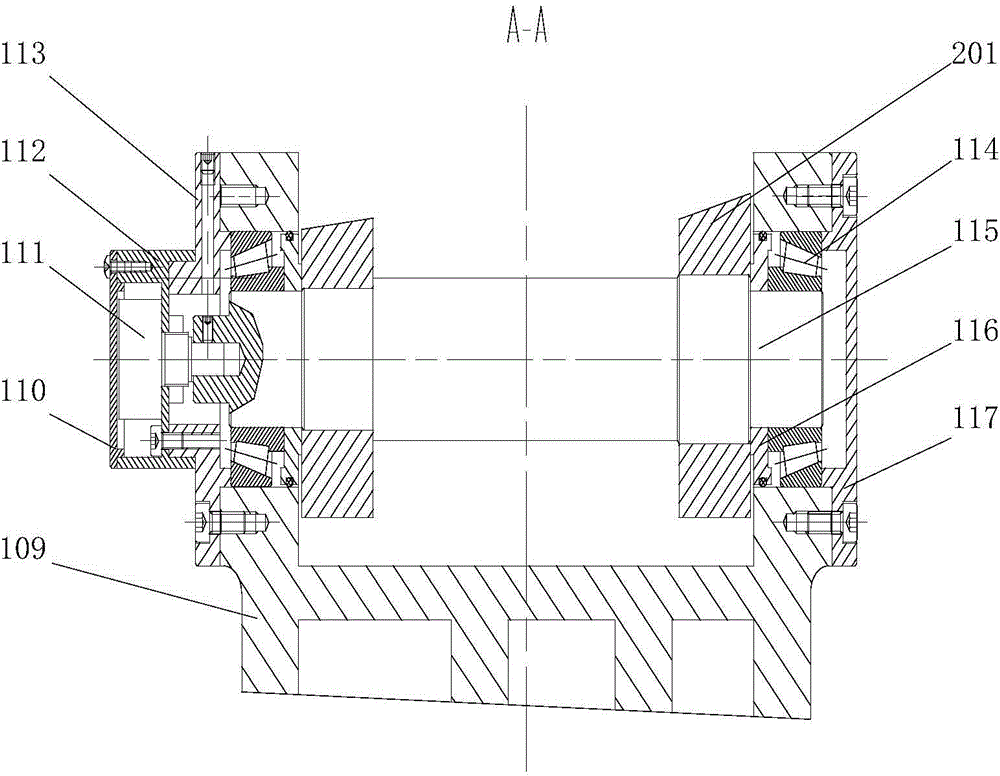
[0035] The structure of connecting rod part I is as figure 2 , image 3 and Figure 4 As shown, it includes a base 101 , a swing cylinder 102 , an encoder 107 , a connecting rod 109 , an encoder 111 , a shaft 115 and a shaft 118 . The base 101 is used to fix the robot on the ground or other mobile carriers. The lower end of the inner shaft of the swing oil cylinder 102 is fixed on the base 101 with screws, and the upper end of the outer ring of the swing oil cylinder 102 is fixed with an oil cylinder end cover 104 with screws. The encoder 107 is fixed in the encoder housing 106, and the encoder housing 106 is fixed on the cylinder end cover 104 with screws, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More