

A Two-point Measurement Method of Intersecting Double Pipe Clamping Pose Based on Nonlinear Equations
A non-linear equation and measurement method technology, applied in the field of automatic welding control, can solve problems such as low efficiency, cumbersome process, and affecting operation efficiency, and achieve the effects of fewer measurement points, high measurement accuracy, and improved operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
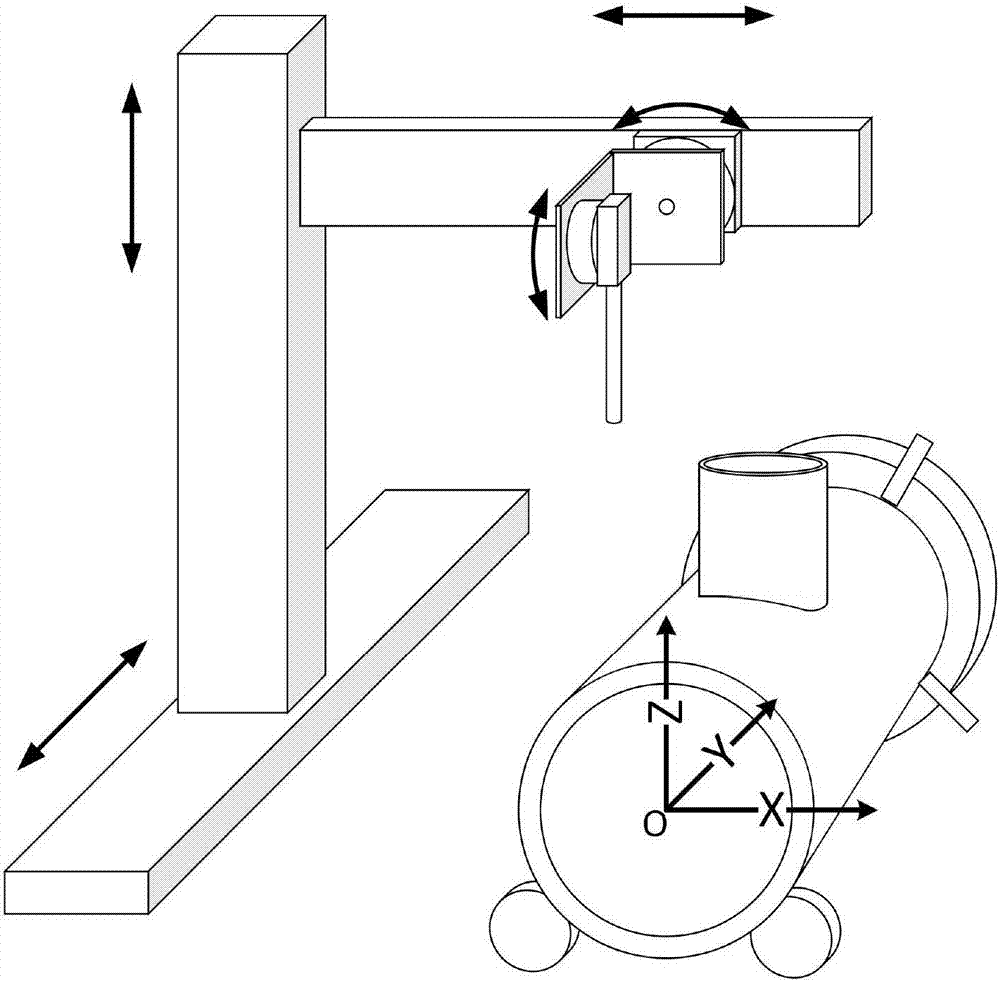
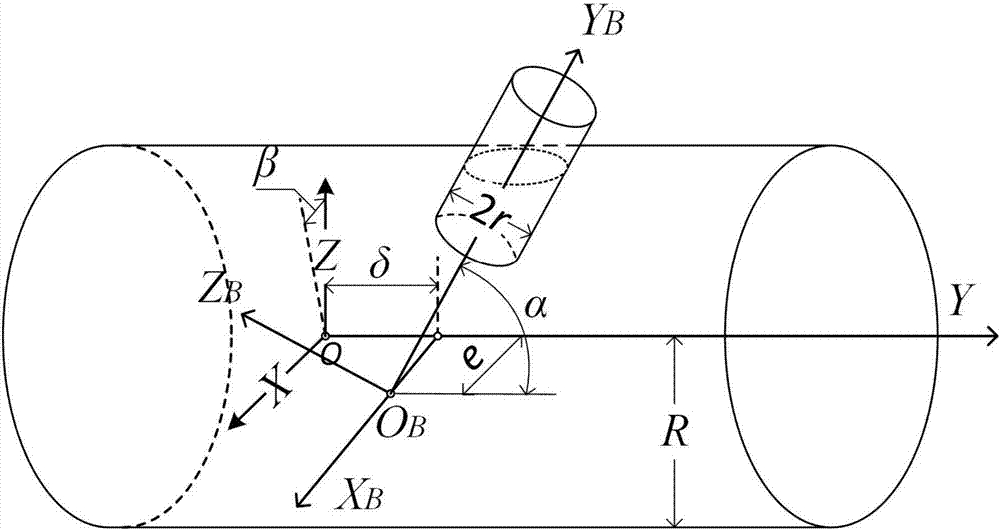
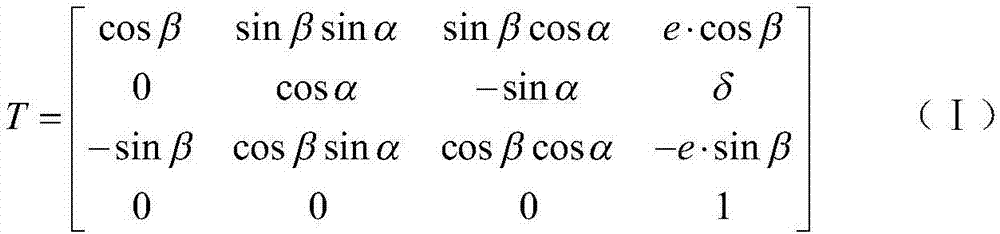
[0034] Such as figure 1 and figure 2 As shown, this embodiment provides a two-point determination method for intersecting double-pipe clamping pose based on nonlinear equations. This method integrates numerical control measurement, mathematical model establishment and nonlinear equation solution. The machine tool coordinates of two arbitrary points on the outer wall of the branch pipe, combined with the estimated parameters to be solved to solve the initial value, can obtain the clamping pose parameters of the double pipe.
[0035] The structure of the intersecting line welding machine is similar to that of a five-axis milling machine, consisting of three linear axes and two rotary axes. The specific structure is as follows figure 1 As shown, the rotation axis is used to adjust the posture of the welding torch, and the linear axis is used to adjust the position of the welding torch. The specific steps of the assay method are as follows:
[0036] (1) Adjust the origin of th...
Embodiment 2
[0056] This embodiment provides a two-point measurement method for intersecting double-pipe clamping poses based on nonlinear equations. The method steps are as described in Embodiment 1, and the difference is that: when selecting the positions of the two measurement points , the angle difference between the two measuring points along the circumferential direction of the branch pipe is 90°±30°.
[0057] The two measurement points selected according to this distribution rule can minimize the influence of measurement error on the solution accuracy of the parameters to be solved compared with the two measurement points selected arbitrarily.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More