

Universal variable operation controller and control method thereof
A control method and controller technology, applied in the general control system, program control, comprehensive factory control, etc., can solve the problems of single function, poor versatility, poor scalability, etc., and achieve strong scalability and good real-time performance of the program , the effect of improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
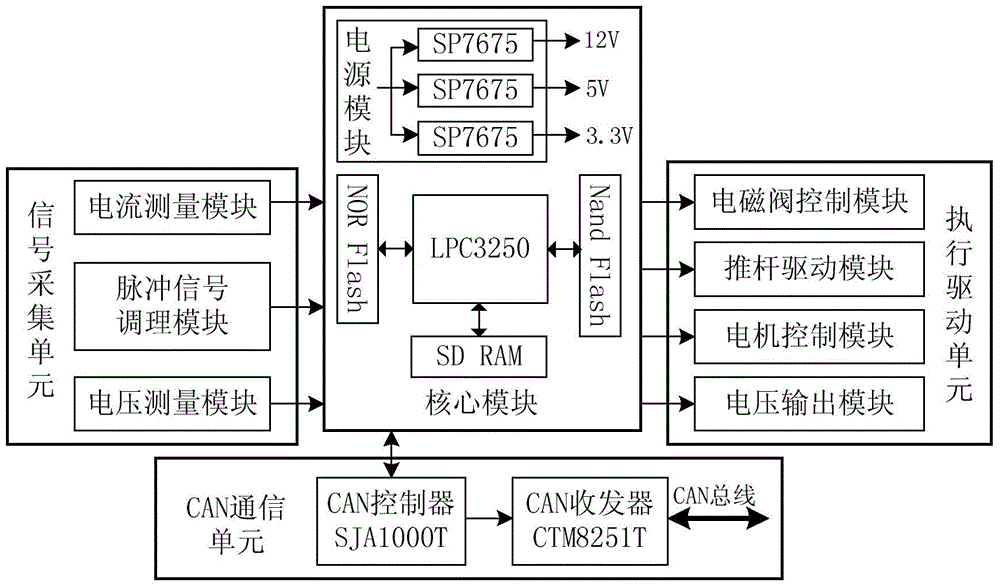
[0049] Such as figure 1As shown, the universal variable operation controller of the present invention is based on the design of the ARM9 core, and is divided into four parts according to its functions: the core unit, the signal acquisition unit, the execution drive unit, and the CAN communication unit, and can realize air-suction seeding, outer tank The variable operation control of wheel fertilization and boom spraying can realize the speed control of wheeled agricultural machinery at the same time, providing stable driving speed for variable operation.
[0050] The core unit includes an ARM9 core unit and a power module. The ARM core unit is based on a 32-bit LPC3250 embedded processor. The controller has an ARM926EJ-S core and a vector floating-point coprocessor with powerful mathematical operations. Function, and has a series of standard ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More