

Two-translation manipulator adopting heavy-load gear transmission
A gear transmission and manipulator technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of bloated robot structure and large space, and achieve compact overall structure, small space and small inertia of manipulator. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
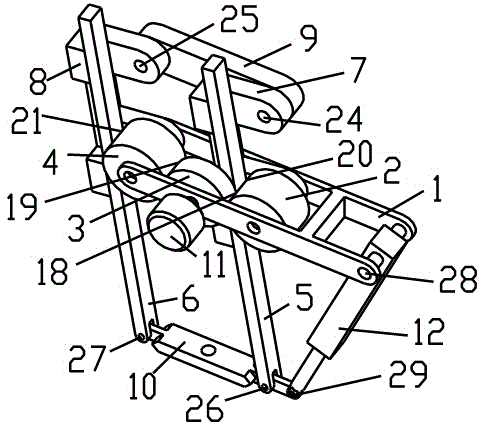
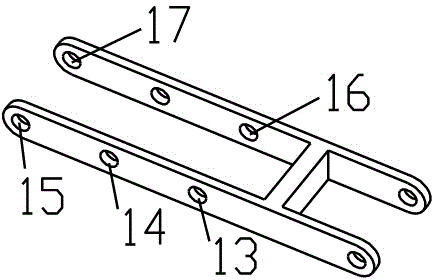
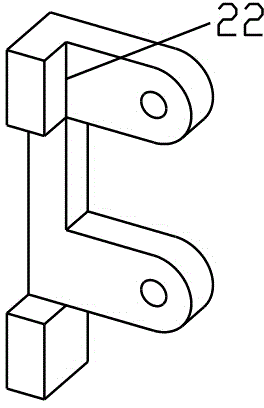
[0014] control figure 1 , figure 2 , image 3 and Figure 4 , gear transmission heavy-duty two translational manipulators, including frame 1, first gear 2, second gear 3, third gear 4, first connecting rod 7, second connecting rod 8, connecting rod 9, first Rack 5, second rack 6, moving platform 10, motor 11 and linear driver 12.
[0015] The first gear 2 is connected with the frame 1 through the first rotating pair 13, the first gear 2 is connected with the second gear 3 through the first gear pair 18, and the first gear 2 is connected with the first rack through the second gear pair 20 5, the second gear 3 is connected with the frame 1 through the second rotating pair 14, the second gear 3 is connected with the third gear 4 through the third gear pair 19, and the third gear 4 is connected with the frame 1 through the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More