

System and method for collaboratively navigating, investigating and monitoring unmanned aerial vehicle and intelligent vehicle
A technology of collaborative navigation and monitoring system, applied in three-dimensional position/channel control, two-dimensional position/channel control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The specific embodiments of the present invention will be described in detail below in conjunction with the drawings.
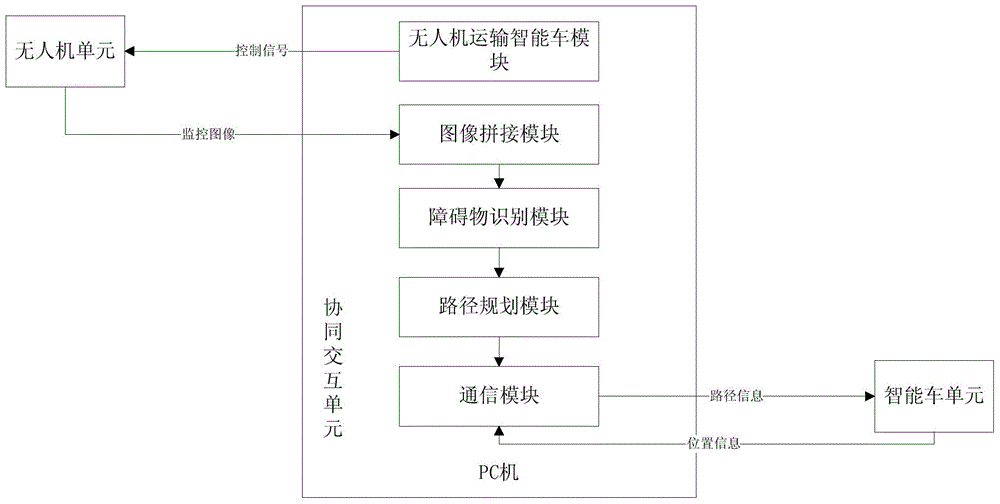
[0047] A coordinated navigation and reconnaissance monitoring system for drones and smart cars, such as figure 1 Shown, including UAV unit, PC and smart car unit.
[0048] The UAV unit is used to monitor the designated area, collect the ground image of the monitoring area at a fixed frequency, and transmit it to the collaborative interaction unit via WIFI, and at the same time transport the smart car unit attached to the bottom of the UAV unit to the designated area.
[0049] The PC is used to splice multiple ground images of the monitoring area collected by the drone unit to get the picture of the entire monitoring area, identify obstacles in the image, and plan the driving path of the smart car unit to obtain optimal driving path information At the same time, it communicates with the smart car unit and transmits the specified optimal driving path informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More