

Indoor area covering method suitable for vehicle type mobile robot
A mobile robot, robot technology, applied in two-dimensional position/channel control and other directions, to achieve the effect of improving coverage efficiency, improving work efficiency, and reducing the number of turns
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] This embodiment is implemented on the premise of the technical solution of the invention, and detailed implementation schemes and processes are given, but the implementation scope of the present invention is not limited to the following embodiments.
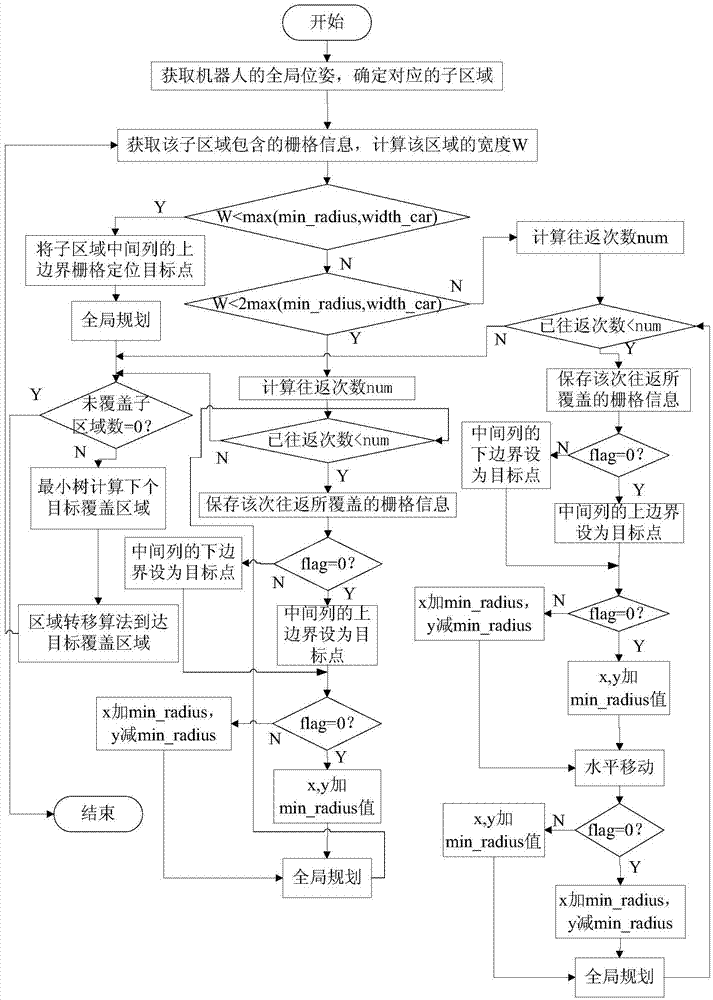
[0035] Such as figure 1 Shown, a kind of indoor environment area coverage method of vehicle type mobile robot, this method comprises the following steps:
[0036] The first step is to obtain the global pose of the current robot, determine the sub-area where it is located, and obtain the width W of the sub-area and the grid information contained in the sub-area;
[0037] In the second step, compare the width W of the sub-area with the larger value of the minimum turning radius min_radius and the vehicle width width_car to determine the coverage strategy of the area;
[0038] In the third step, if W is less than max(min_radius,width_car), the robot only needs to move in one direction to complete the coverage of the area; ot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More