

Variable-freedom-degree modular mechanical arm
A technology of manipulators and degrees of freedom, applied in the field of manipulators, can solve the problems of inability to complete the combination and replacement of joints, poor flexibility, and different joint structures, etc., to achieve compact overall structure design, reduce costs, and facilitate internal wiring Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described in detail below in conjunction with the accompanying drawings.
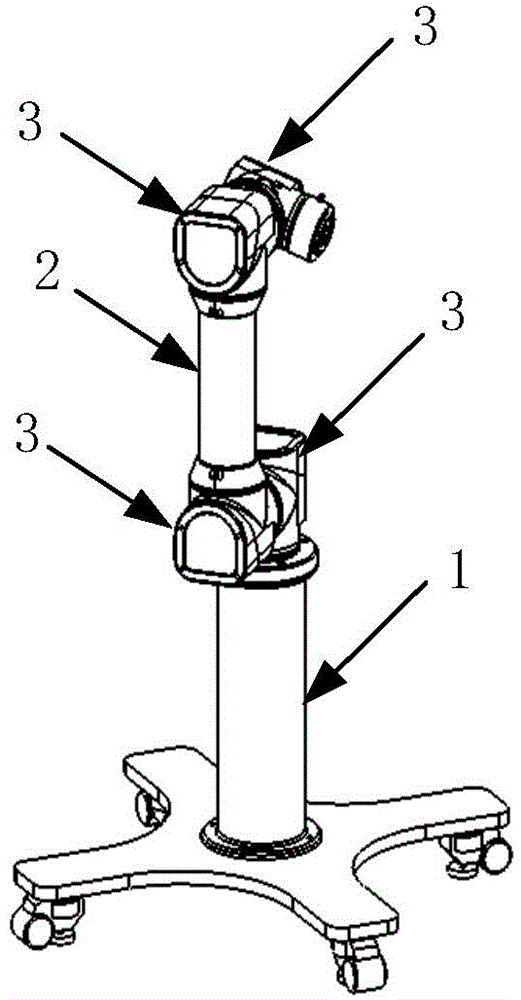
[0053] The modularized mechanical arm with variable degrees of freedom of the present invention includes a base 1, a mechanical arm link 2 and a mechanical arm joint 3; the base is used to support the mechanical arm and realize the setting and installation of the mechanical arm; the mechanical arm link 2 between the manipulator link 2 and the base 1, and between the manipulator link 2 and the end effector are all connected through the manipulator joints, as figure 1 shown.
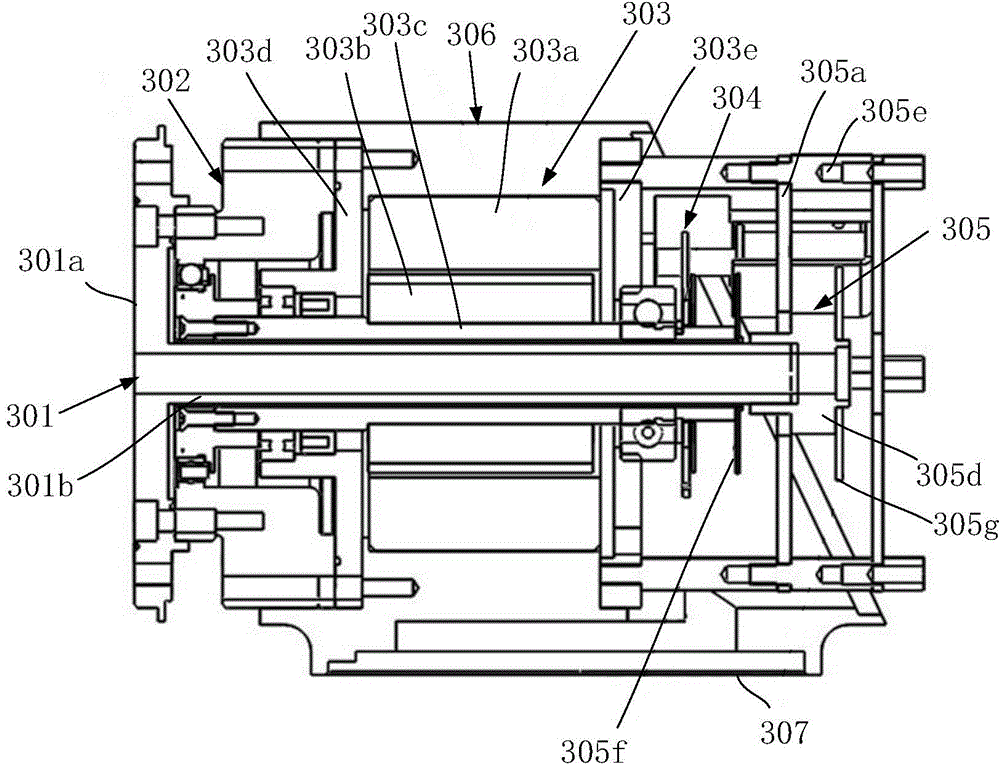
[0054] The mechanical arm joint 3 includes an output flange shaft 301, a harmonic reducer 302, a hollow shaft motor 303, a brake device 304, a double code disc positioning mechanism 305 and a housing 306, such as figure 2 shown.
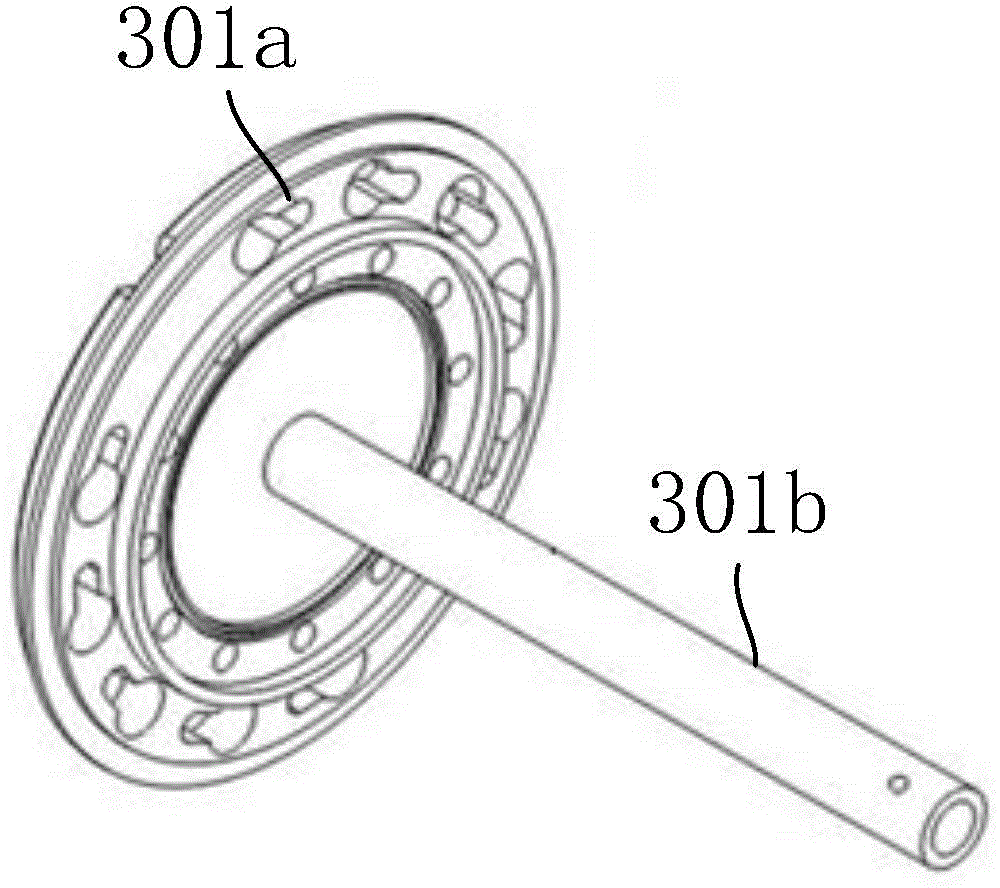
[0055] The output flange shaft 301 is an integral structure composed of two parts, the output flange 301a and the output shaft 301b, as image 3 As shown, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More