

Robot dynamics modeling method based on multibody system discrete time transmission matrix method
A dynamic modeling and discrete time technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as difficult compensation of tracking errors, lack of non-holonomic constraints on mobile platforms, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0082] Embodiment 1, mobile robot dynamics modeling method based on multi-body system discrete time transfer matrix method
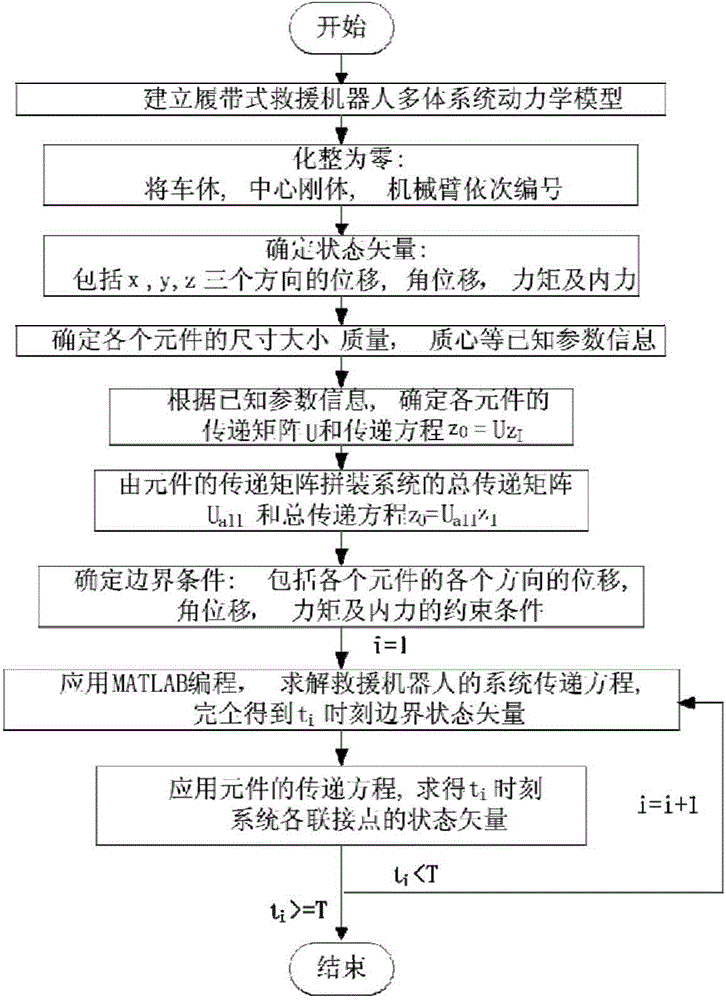
[0083] The inventive method comprises:
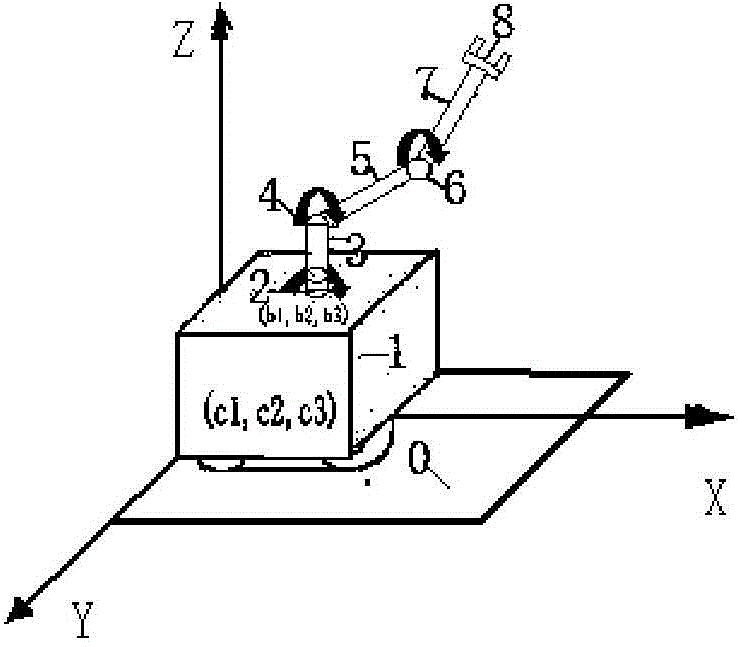
[0084] First, summarize the structural model of the tracked mobile robot, that is, extract the main features of the tracked mobile robot to be studied according to the traditional method, and its structural model is shown in the attached figure 1 As shown, including the car body, the manipulator rod, the rotating joint (central rigid body) and the end of the manipulator.
[0085] Second, divide the whole into parts, and number the overall mechanical structure of the robot: 0—ground, 1—car body, 2,4,6—central rigid body, 3,5,7—mechanical arm, 8—end of mechanical arm.
[0086] Third, determine the basic parameter information such as the coordinates of the center of mass, external dimensions, and quality of each component of the robot, as shown in Table 1:
[0087] Table 1
[0088]
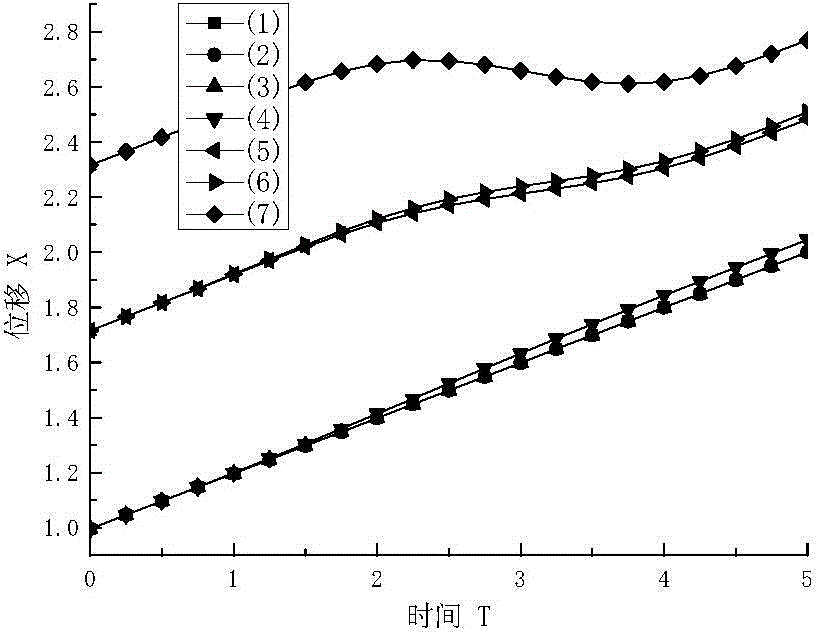
[0089] The law of motion of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More