

Wall-climbing robot
A crawling robot and robot technology, applied in the field of robotics, can solve the problems of high wall finish and flatness, loss of use of wall-climbing robots, limited flexibility of robots, etc., to achieve flexible adjustment, ensure portability, The effect of increasing the contact area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
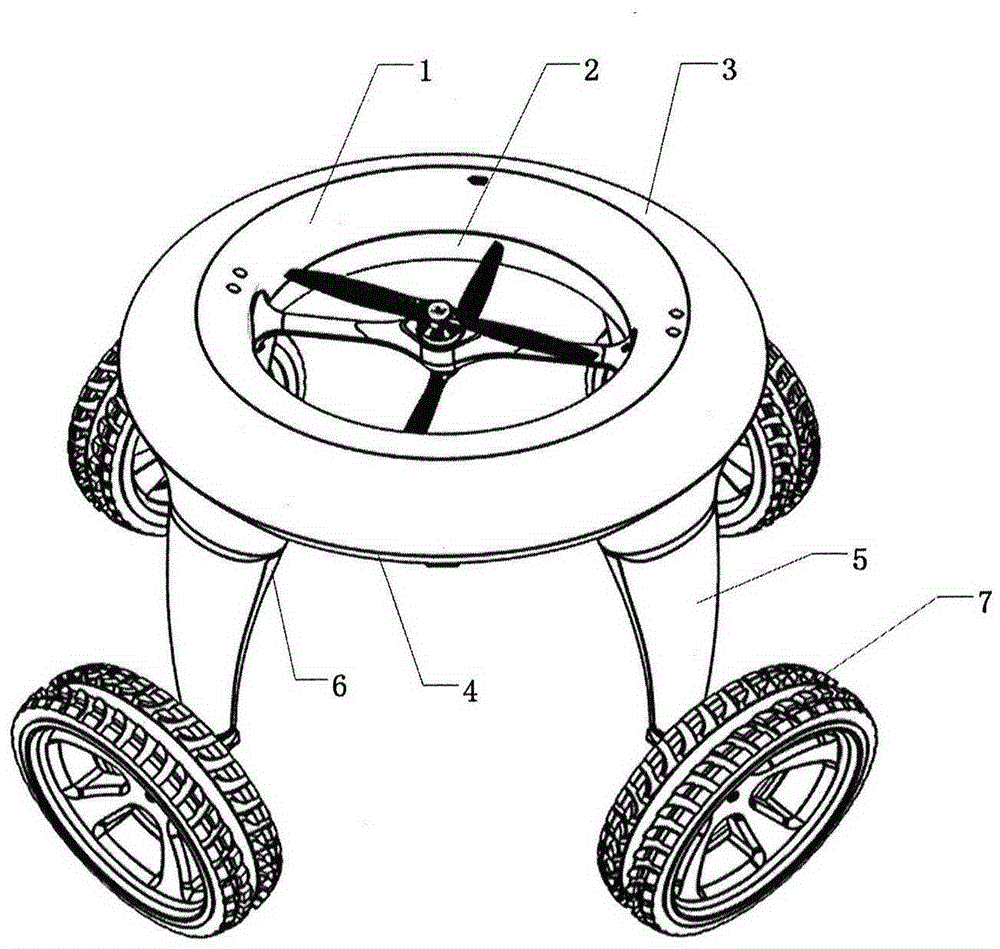
[0026] A wall crawling robot includes a lift self-balancing system, a wall walking device, a body frame structure, and a wall working device. The lifting self-balancing system, the wall walking device, and the wall working device are installed on the body frame structure. The lift self-balancing system is used to provide the robot with lift and pressure on the wall, the wall walking device is used to enable the robot to walk on the wall, and the wall working device is used to monitor the movement of the robot and the wall conditions.
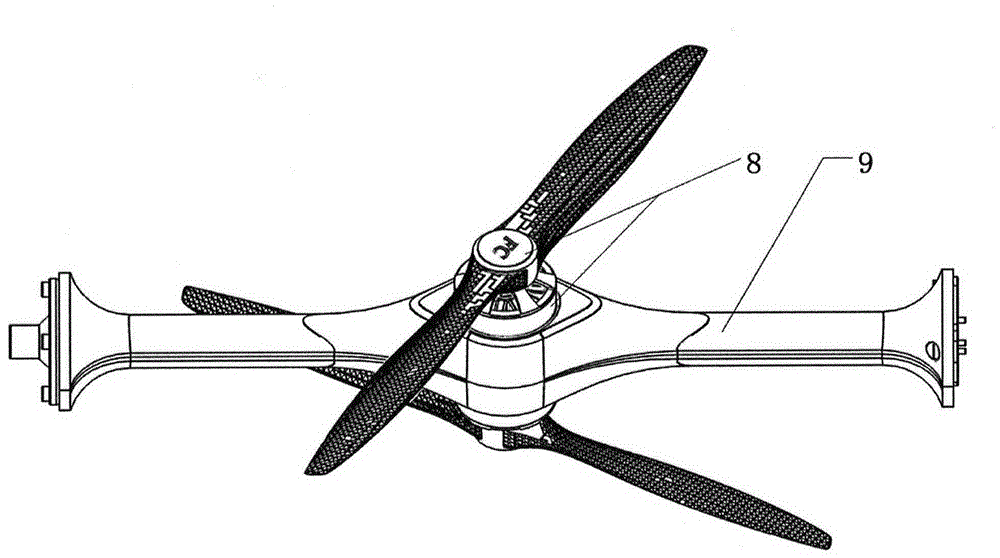
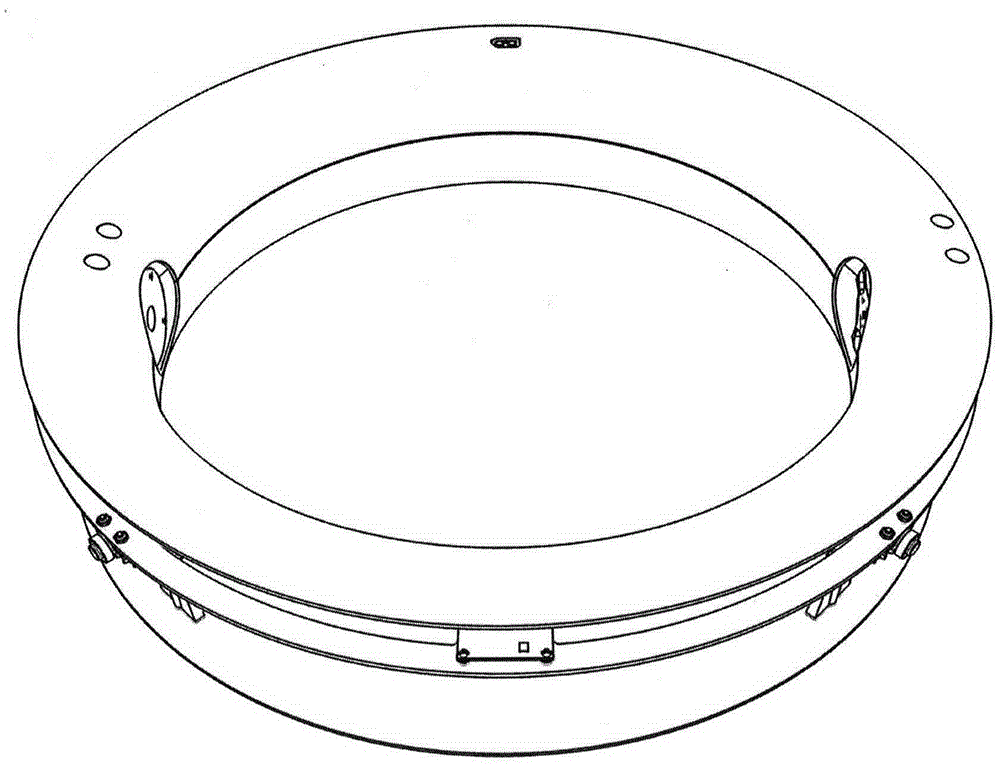
[0027] The lift self-balancing system includes a lift generating device, an inner ring mechanism and an outer ring mechanism; the lift generating device includes a rotor power system 8 and a power system fixing frame 9, and the rotor power system 8 is fixedly mounted on the power system. on the frame 9; the inner ring mechanism includes an inner ring fixing frame 10 and a first connecting piece 15 installed on the inner ring fixing frame 10, a fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More