

Motor control device
A control device and motor technology, applied in the direction of motor control, control system, electrical components, etc., can solve problems such as mechanical damage, and achieve the effects of improving reliability, avoiding mechanical damage, and easy positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0051] Configuration of the motor control device 100
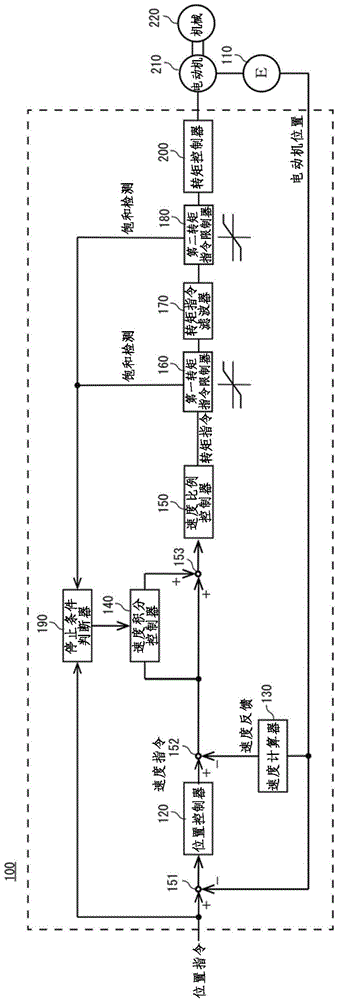
[0052] figure 1 It is a block diagram of the motor control device of Embodiment 1. The motor control device 100 has: a position controller 120, a speed calculator 130, a speed integral controller 140, a speed proportional controller 150, a first torque command limiter 160, a torque command filter 170, a second torque command limiter device 180, stop condition determiner 190 and torque controller 200.
[0053] The deviation between the position command and the motor position is input to the position controller 120 . The position controller 120 outputs a speed command based on the input deviation.
[0054] The motor position is input to the speed calculator 130 . The speed calculator 130 outputs speed feedback based on the input motor position.
[0055] The deviation between the speed command and the speed feedback is input to the speed integral controller 140 . The speed integral controller 140 integrates the input d...
Embodiment approach 2
[0089] Configuration of the motor control device 300
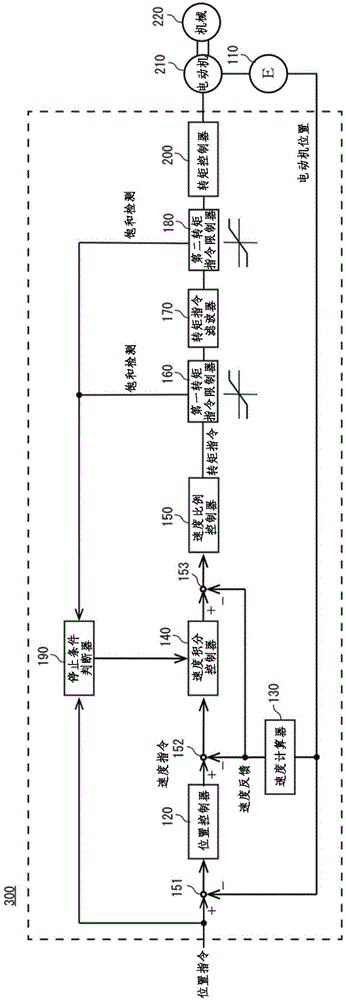
[0090] figure 2 It is a configuration diagram of another motor control device according to the second embodiment. The motor control device 300 uses IP control. The constituent elements of the motor control device 300 and figure 1 The motor control device 100 shown is the same. Therefore, for figure 1 The same constituent elements are assigned the same reference numerals.
[0091] The motor control device 300 differs from the motor control device 100 in the following points. That is, in the motor control device 300 , the bypass circuit of the speed integral controller 140 directly connecting the addition point 152 and the addition point 153 does not exist. In addition, in the motor control device 300 , speed feedback is performed on the addition point 153 .
[0092] Operation of the motor control device 300
[0093] overall action
[0094] First, the position command and the motor position of the motor 210 detec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More