

Multi-medium complex-environment high-precision vision/inertia combination navigation method
A complex environment and inertial combination technology, applied in the field of integrated navigation, can solve problems such as aggravation and divergence of navigation results, and achieve the effect of avoiding pollution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
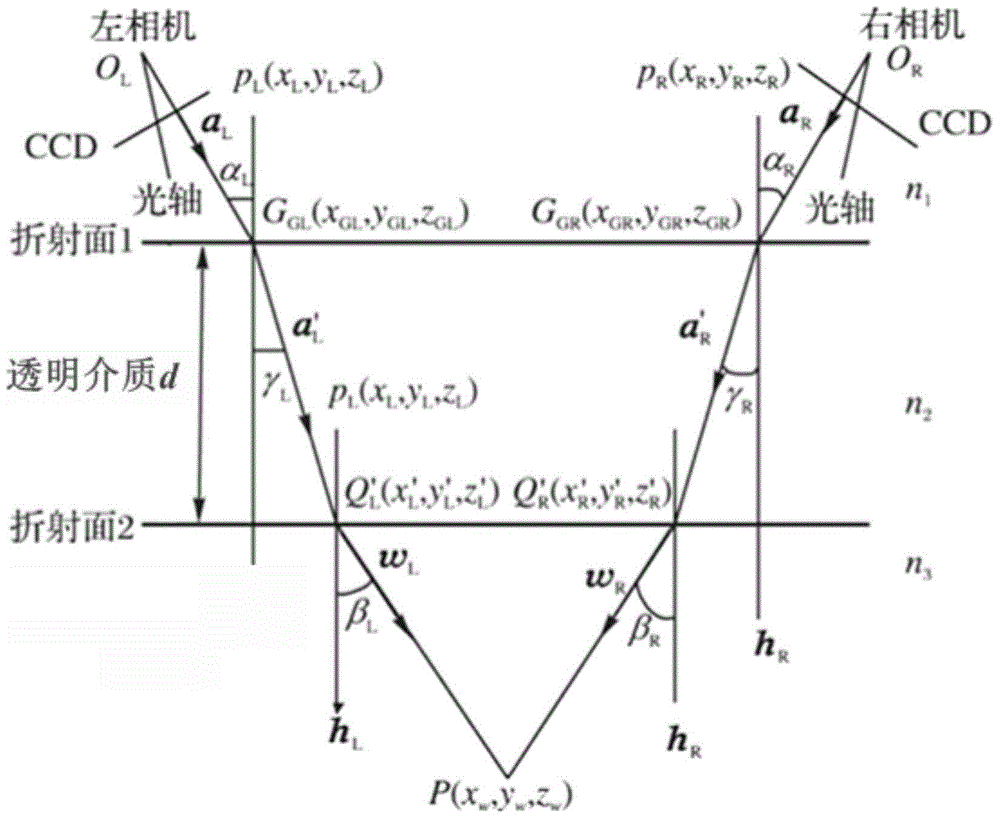
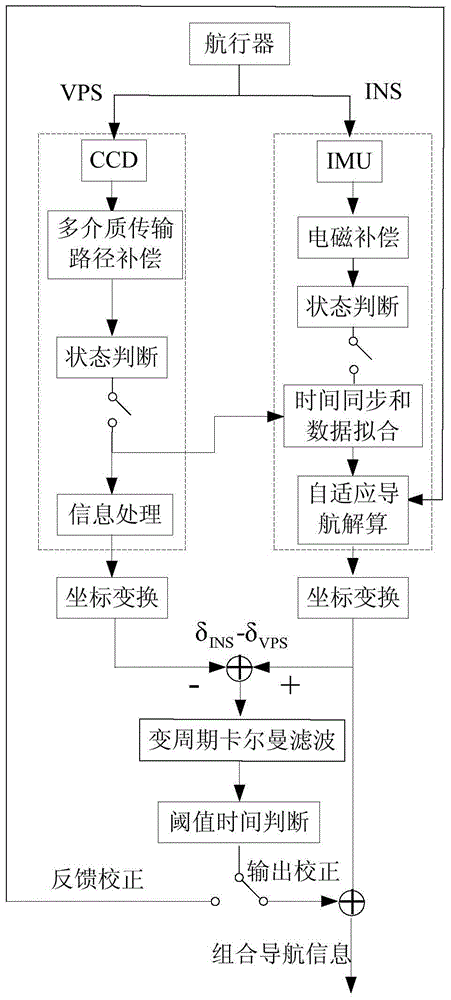
[0046] The implementation of the method of the present invention will be described in detail below in conjunction with the accompanying drawings. The principle diagram of the present invention is as figure 2 As shown, the specific steps include:
[0047] Step 1. By calibrating the high-speed binocular CCD camera, establish the positional relationship between the left and right cameras, and establish the VPS visual navigation coordinate system (the visual navigation coordinate system takes the camera installation position as the origin, the X axis points to the west, the Y axis points to the south, and the Z axis points to the south. Axis pointing to the right-handed coordinate system formed by the sky), using a high-speed binocular CCD camera to collect images of underwater vehicles, according to the refractive index of light in air, transparent media, and water and establishing multiple refraction light path equations, to achieve multiple Media transmission path compensatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More