

Non-linear system adaptive optimal control method based on variable error
A nonlinear system, optimal control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as unknown dynamic characteristics, difficult mathematical models, model uncertainty, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
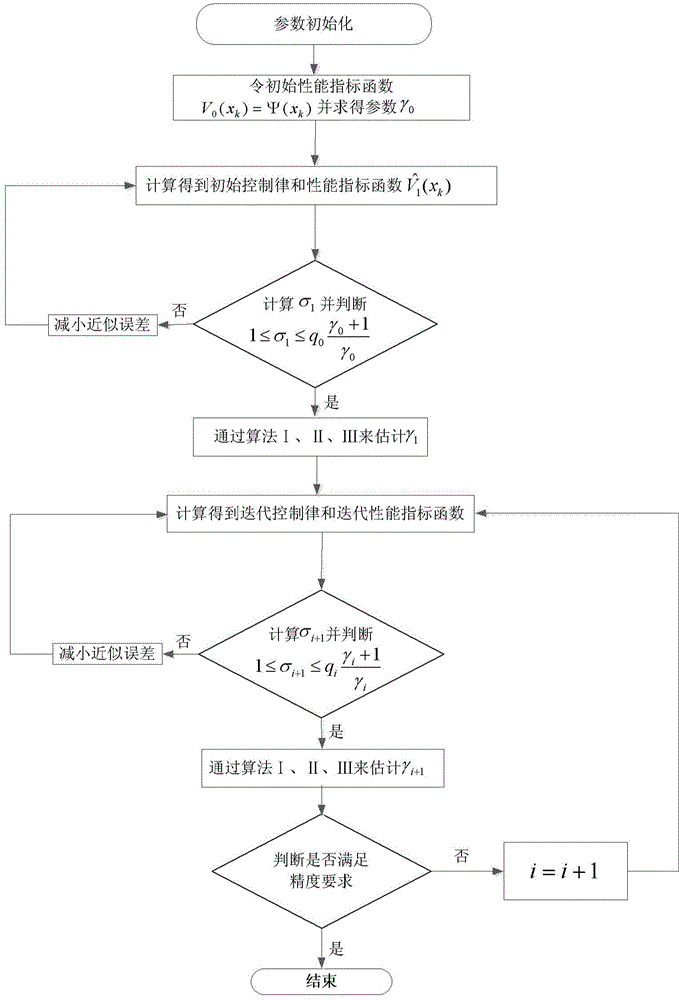
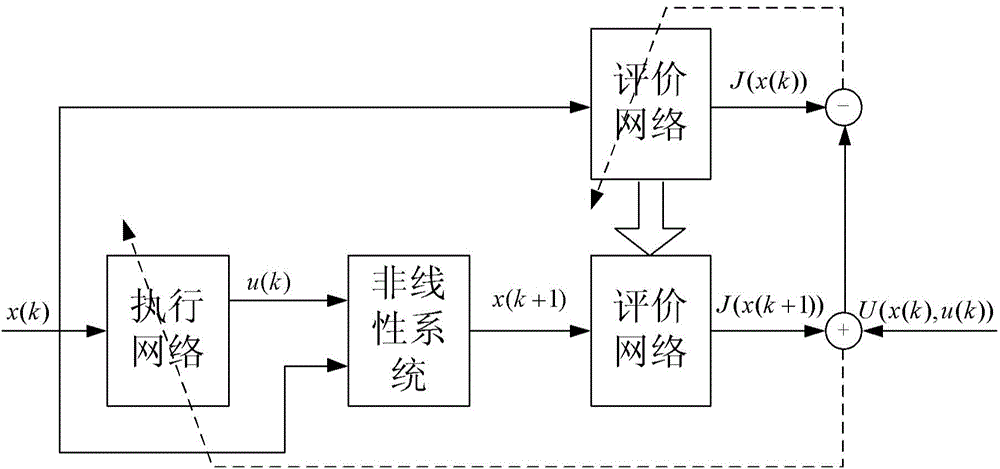
[0039] The invention discloses a variable error nonlinear self-adaptive control method, which belongs to the optimal control field. Among the existing optimal control methods, adaptive dynamic programming is widely used in nonlinear systems. Traditional adaptive dynamic programming is generally divided into two steps: the strategy performance index function evaluation process and the strategy update process. It requires that each performance index function and policy control function can be accurately obtained, but it is often not possible in practical computing applications. accomplish.
[0040] Specifically, the nonlinear system studied by the present invention is x k+1 =F(x k , u k ), k=0, 1, 2, ..., where is the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More