

Catapulting type fast grabbing robot
A robotic and catapult technology, applied in manipulators, manufacturing tools, etc., can solve the problems of small operation range, slow grasping speed of bionic grasping robots, weak stretching ability, etc., to solve the problems of limited grasping space, simple structure, Grab long distance effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
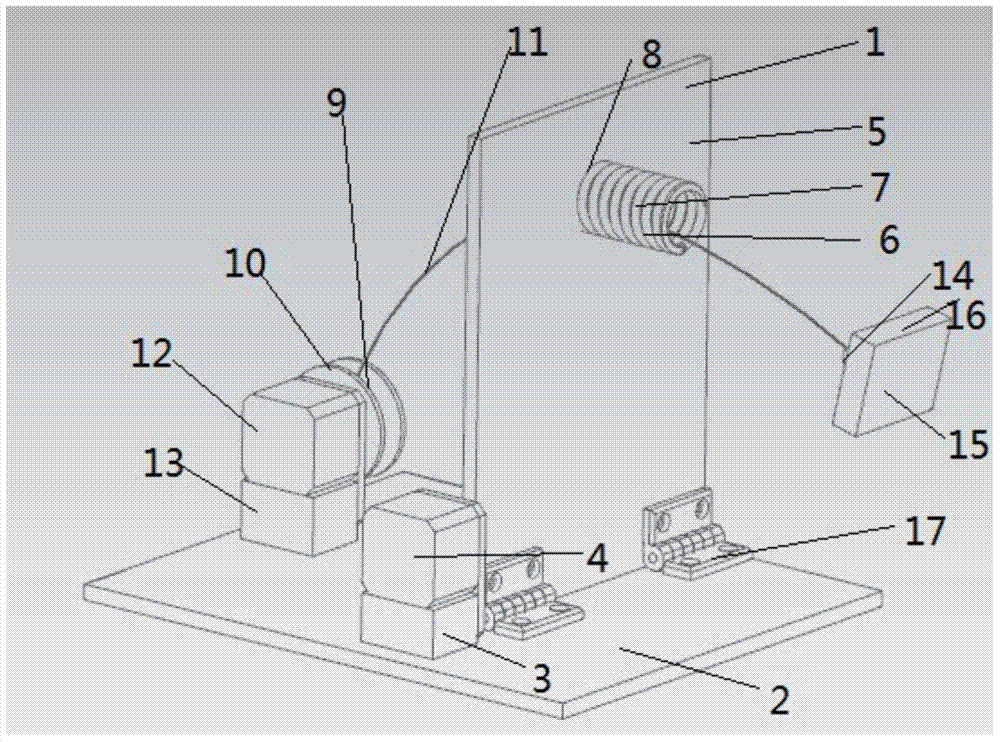
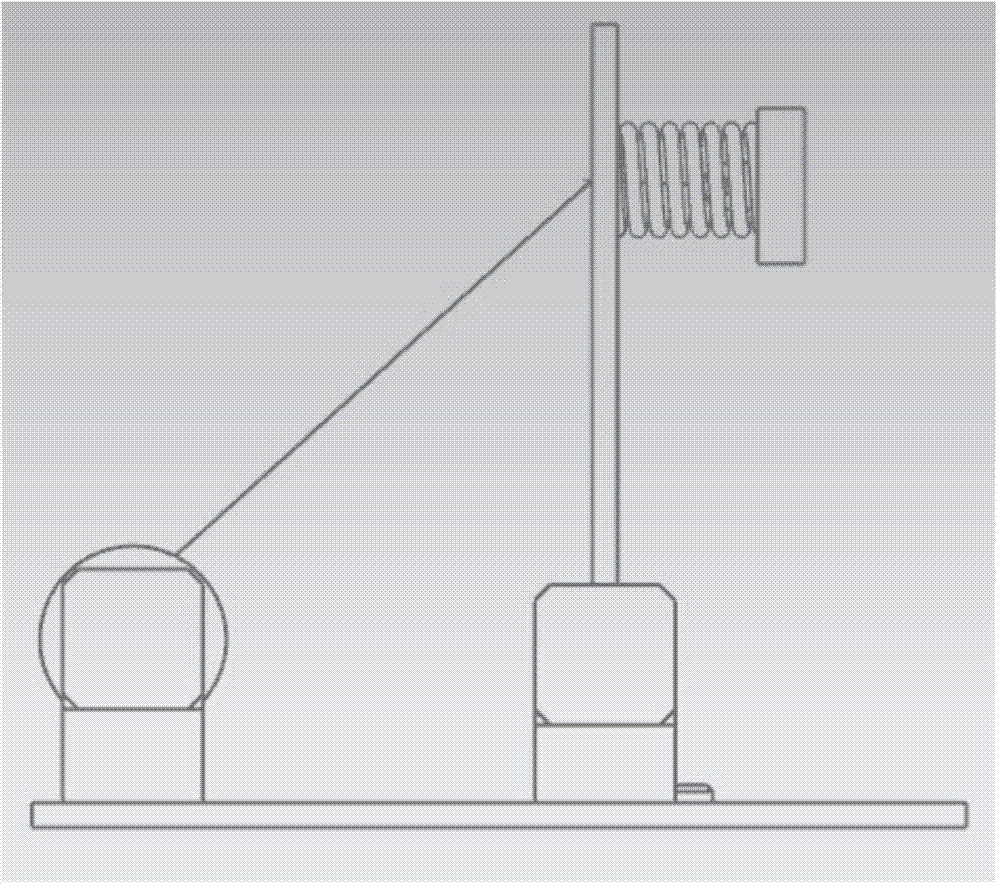
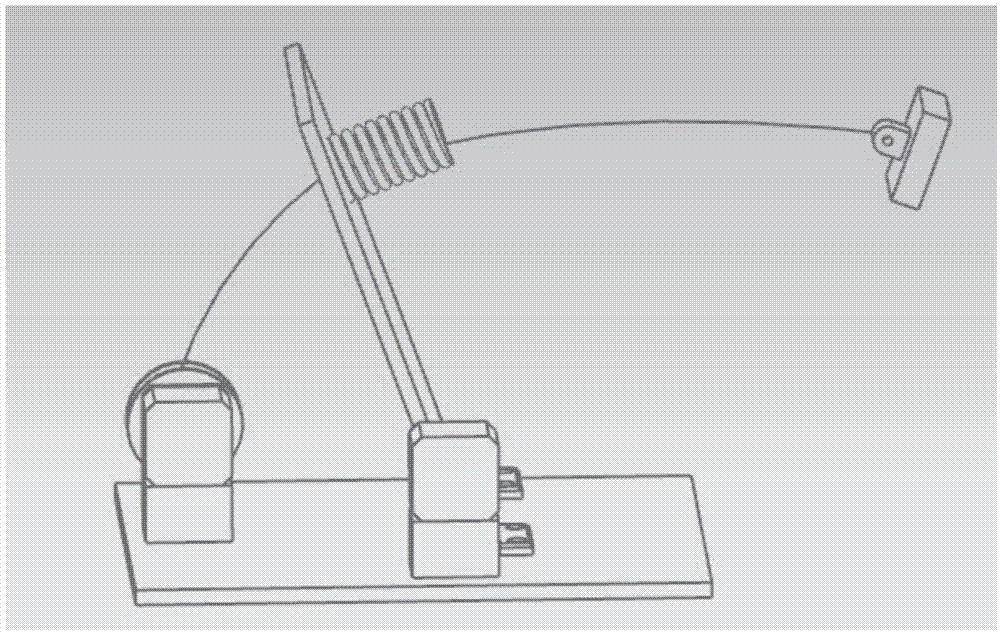
[0016] Below in conjunction with accompanying drawing, the present invention is explained in detail, as figure 1 , a kind of catapult fast grasping robot, comprises direction adjustment mechanism 1, base 2, launching mechanism 6, retraction mechanism 9 and adhesion grasping mechanism 14; Described direction adjustment mechanism (1) is controlled by servomotor one (4) , a direction adjustment plate (5) and a hinge (17), the direction adjustment plate (5) is installed on the base (2) through the hinge (17), and the support is fixed on the base (2) One (3), servomotor one (4) is installed on the support one (3), and the output shaft of the servomotor one (4) is connected to the direction adjustment plate (5); the launching mechanism (6) is composed of a compression spring ( 7) and connection device one (8), one end of the compression spring (7) is fixed on the side of the direction adjustment plate (5) through the connection device one (8); the contraction mechanism (9) is compos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More