

Wheel type mobile robot navigation method based on IHDR self-learning frame
A mobile robot and navigation method technology, applied in two-dimensional position/channel control, etc., can solve problems such as poor adaptability, inability to adapt to complex, changeable and unknown environments, and achieve efficiency and success rate improvement, intelligence high degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The mobile robot manually trains the robot's "walking" behavior, stores the corresponding learning mechanism, and then moves autonomously in the same environment without human control. Attached below Figure 1-5 The present invention is described in detail:
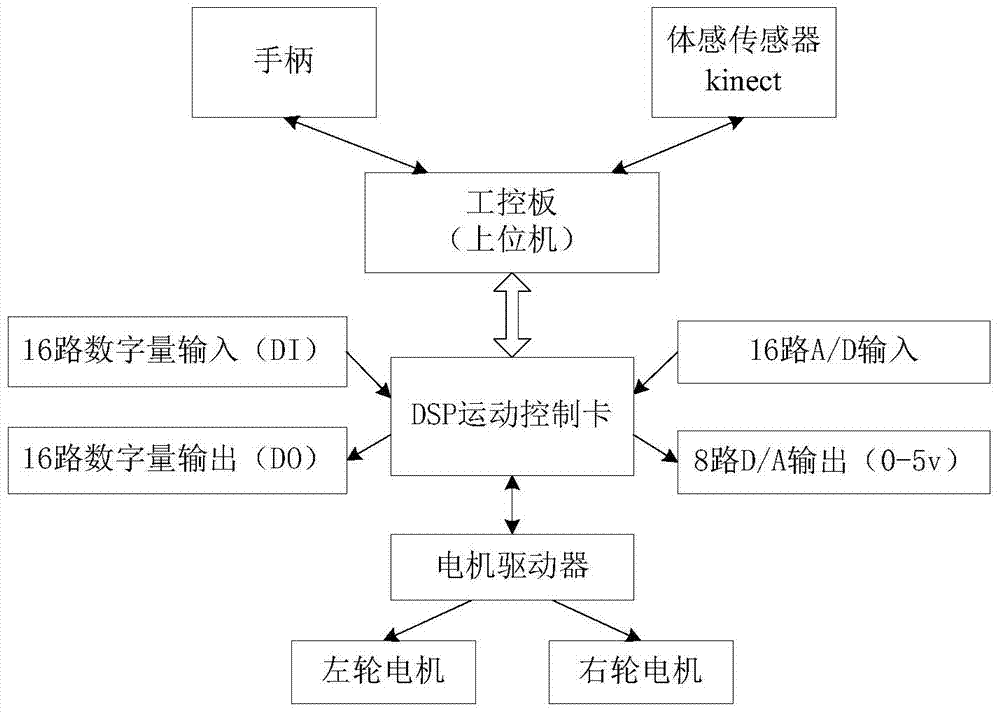
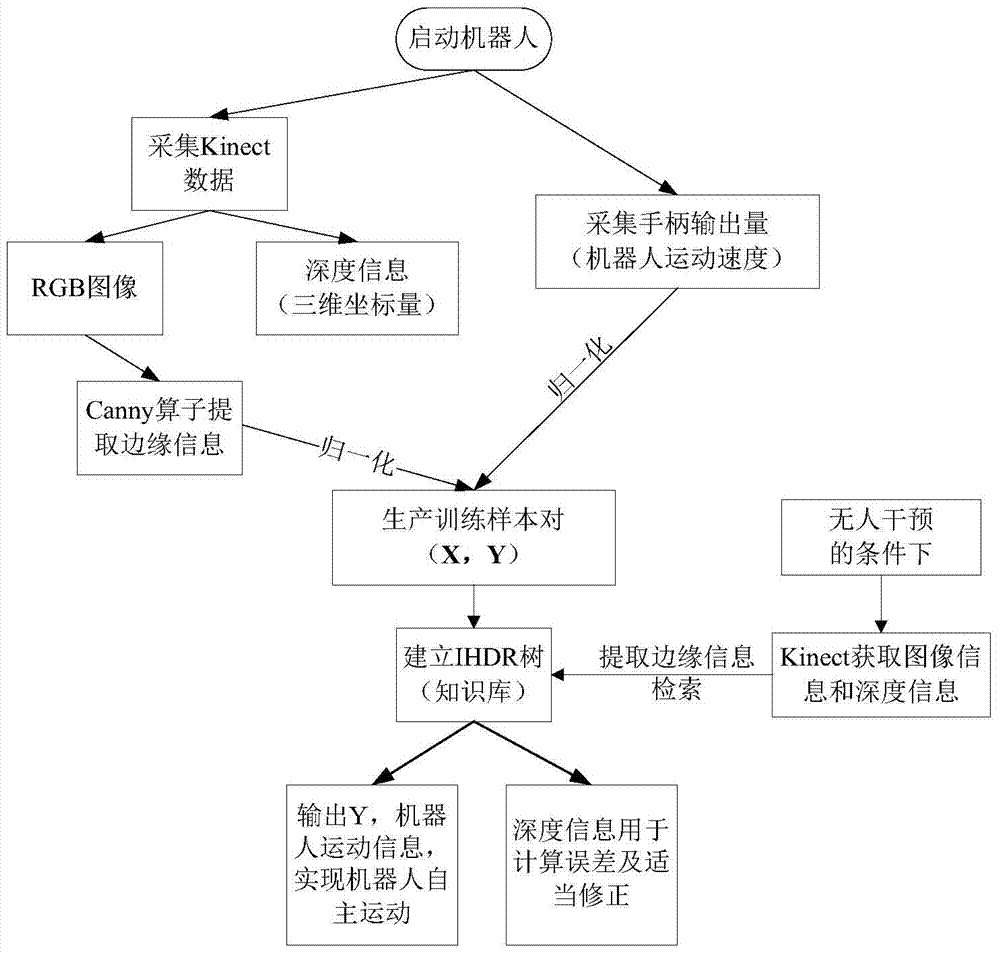
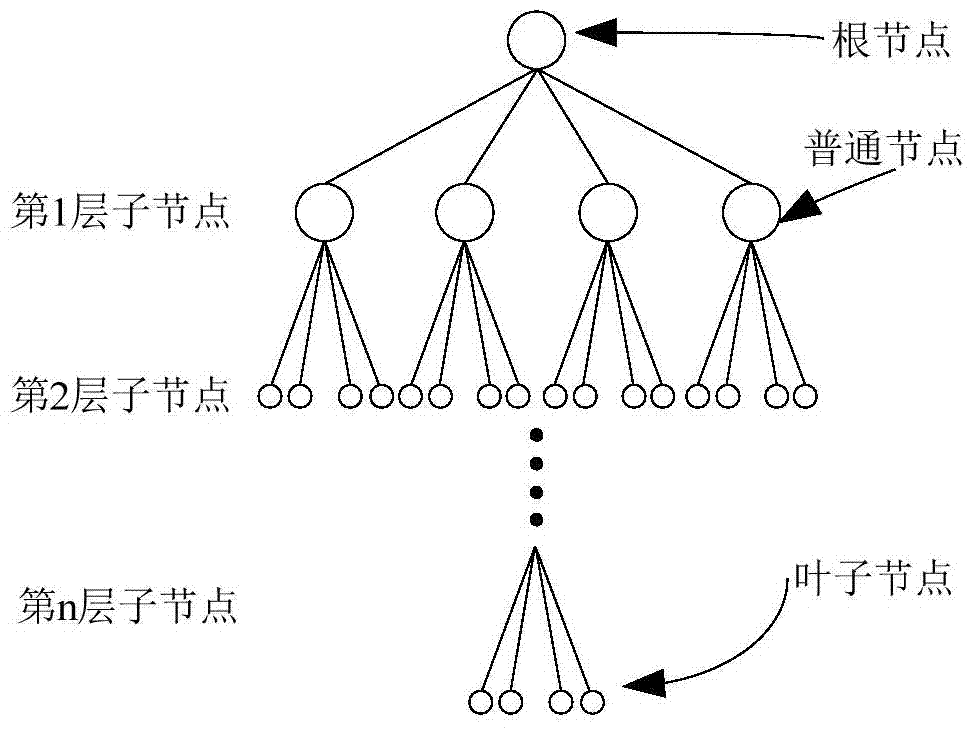
[0036] The present invention communicates with the upper computer through the handle controller to control the robot to move forward, backward, left, and right through the motion control card, and collects some image information and depth information that the robot "sees" through the kincet sensor, and then uses the IHDR algorithm to establish the IHDR tree structure. The autonomous learning framework stores the learned "knowledge" in the knowledge base, and finally, without human intervention, the robot can retrieve the IHDR tree structure in real time to obtain the corresponding motion data and feed it back to the robot to realize the autonomous movement of the robot; including The main steps are as follows:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More