

Variable-ship-length-rate-based crosswind-resistant straight path tracking method of unmanned surface vessel
A straight-line path and surface boat technology, applied in two-dimensional position/channel control, instrumentation, adaptive control, etc., can solve the problem of unmanned boats losing performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the technical means realized by the present invention, creative features, achievement goals and effects easy to understand, the present invention will be further elaborated below in conjunction with specific illustrations:
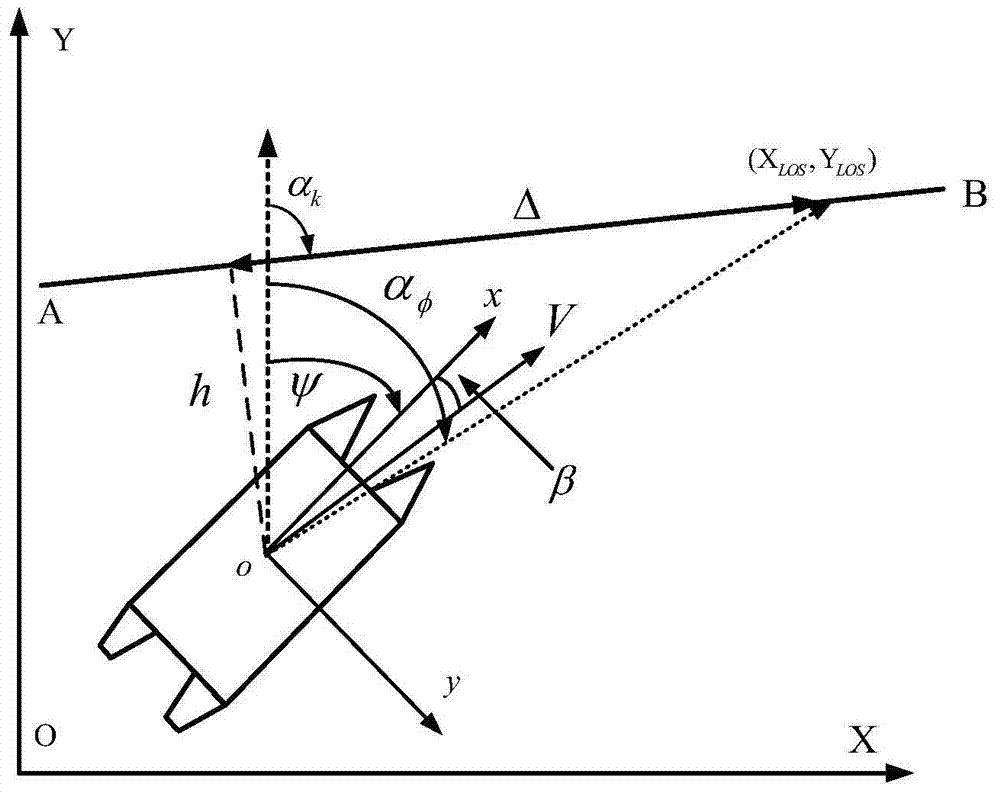
[0038] The method for tracking the straight path of the crosswind-resistant unmanned surface craft based on the variable length ratio of the present invention is based on LOS.
[0039] (Line-of-Sight) control method is realized by selecting a suitable virtual navigation point on the straight path, guiding the unmanned surface craft to track the virtual navigation point, and finally making the unmanned surface craft sail along the straight path; There is a certain distance between the navigation point and the projection point of the unmanned surface craft on the straight path. This distance is generally called the visual distance of the unmanned surface craft, which is based on the length of the hull. The ratio of the visual distance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More