

Robot controller
A technology of control devices and robots, applied in the direction of program control, comprehensive factory control, general control system, etc., can solve problems such as difficult to repeat learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
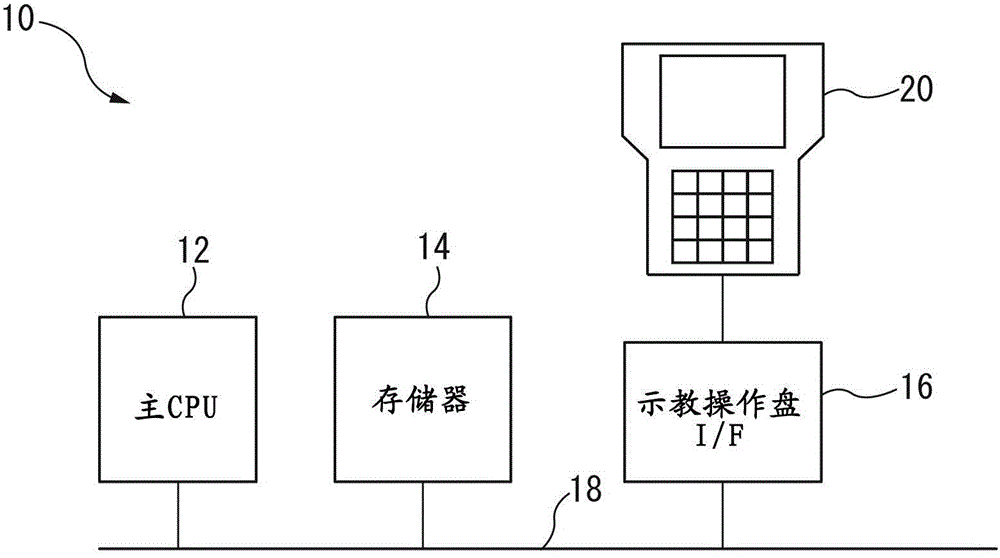
[0020] figure 1 It is a figure which shows an example of the internal structure of the robot control apparatus 10 which concerns on a preferable embodiment of this invention. The control device 10 has a main CPU 12; a memory 14 including a read-only memory (ROM), a volatile memory, and a nonvolatile memory; and an interface (I / F) 16 for a teaching pendant, which are connected to each other in parallel via a bus 18 . A teaching pendant 20 is connected to the interface 16 , and the operator can use the teaching pendant 20 to create an operation program, input a work area, and the like. Processes such as extraction of a reference motion pattern, generation of motion patterns, and motion learning are executed by the main CPU 12 .
[0021] In addition, the robot control device of the present invention controls a robot that operates by correcting its own position and posture in a predetermined work area, and includes: a storage unit for storing a standard motion of the robot; An...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More