

Unmanned plane remote control system based on gesture
A remote control system and unmanned aerial vehicle technology, applied in the field of human-computer interaction, can solve the problems of unintuitive control methods, high operator requirements, and inaccuracy, reducing the difficulty of hardware equipment investment and software development, excellent recognition accuracy, Remote operation simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
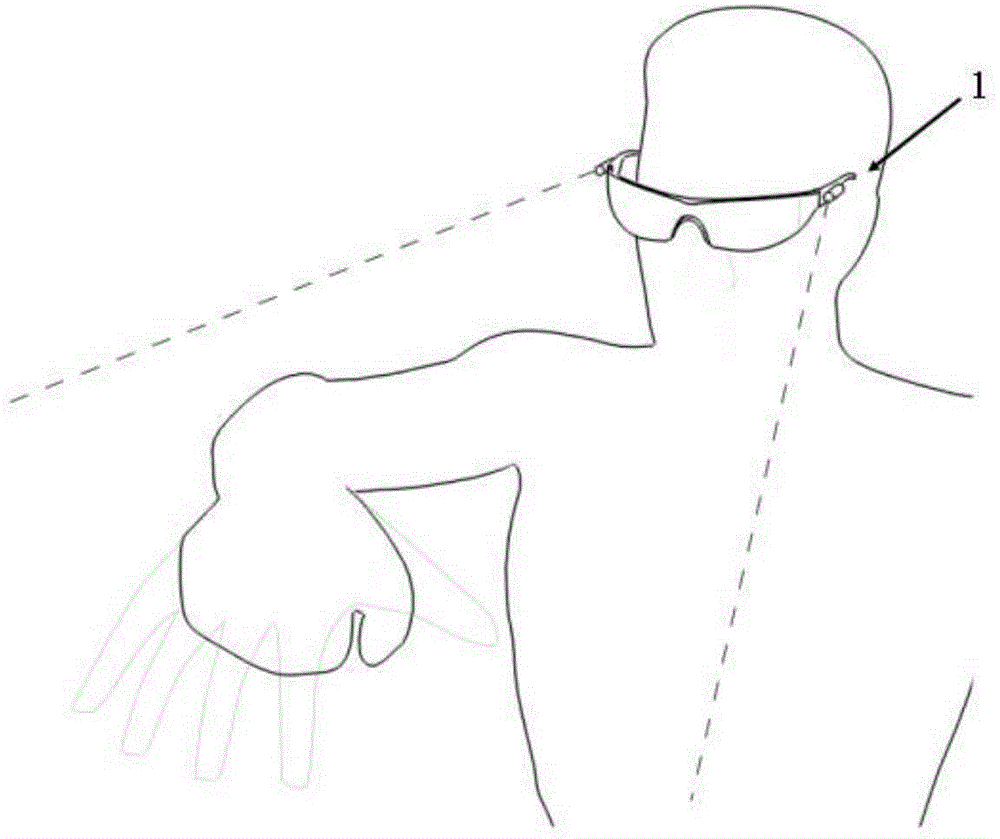
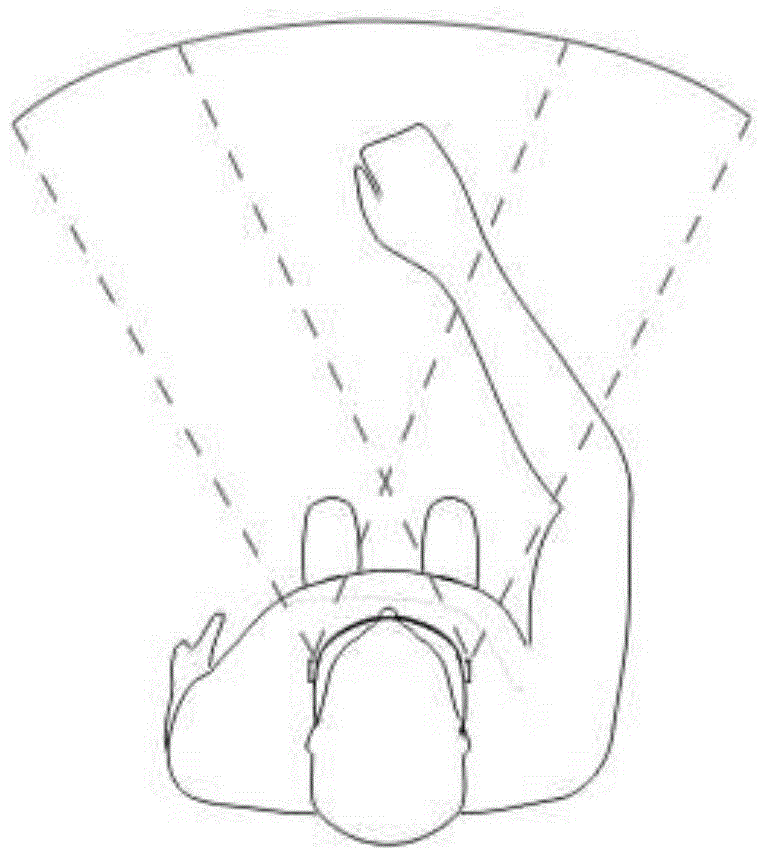
[0035] like figure 1 , figure 2 and Figure 4As shown, the drone remote control system of this embodiment includes a smart glasses 1 (ie, a fixed device) worn on the operator's head and a flight controller 2 mounted on the drone body. The smart glasses 1 at least need to be equipped with one-to-many infrared or thermal imaging or visible light cameras, a three-axis gyroscope, a magnetic compass, a processing device and a transmitting device. At least one GPS positioning device and one receiving device need to be configured inside the flight controller 2 .
[0036] see figure 1 , figure 2 , the steps of using the above system for remote control of drone gestures are as follows:
[0037] First, the drone pilot wears the smart glasses 1 of the present invention on the head. The smart glasses 1 have a built-in lithium battery, which can guarantee a long battery life.
[0038] Before starting the remote control, it is necessary to preset a remote control start command and ...
Embodiment 2
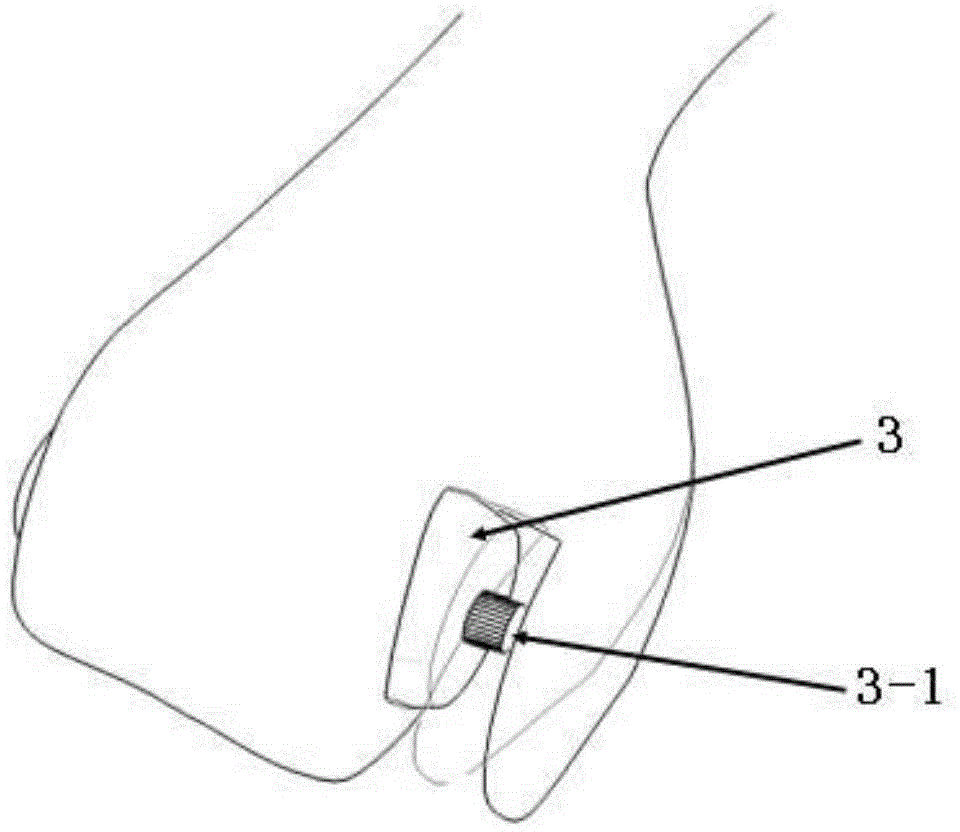
[0049] like image 3 and Figure 4 As shown, the UAV remote control system of this embodiment includes a fixed device 1 worn on the waist or chest of the operator, a flight controller 2 installed on the fuselage of the UAV, and a handheld device held by the operator 3. At least one GPS positioning device, one processing device and one transmitting device need to be configured inside the fixed device 1 . At least one GPS positioning device and one receiving device need to be configured inside the flight controller 2 . The handheld device 3 is provided with at least one grab button 3-1, and at least one GPS positioning device, a three-axis gyroscope and a magnetic compass need to be configured inside the handheld device 3.
[0050] see image 3 and Figure 4 , the steps of using the above system for remote control of drone gestures are as follows:
[0051] First, the drone pilot wears the fixation device 1 of the present invention on the waist or chest. The fixed device 1...
Embodiment 3
[0061] Embodiment 3 is basically the same as Embodiment 2, except that the motion detection device installed in the fixed device in Embodiment 3 is an RFID group receiving device composed of multiple RFID antennas that can distinguish directions; Installed is an RFID transmitter. When the grab button is in the pressed state, the RFID group receiving device receiving device and the RFID transmitting device in the fixed device and the handheld device work, and the distance x between the human hand and the fixed device before the human hand starts to move is obtained through RFID technology , the hand movement distance y and the movement direction Az.
[0062] Furthermore, if Image 6 and Figure 7 As shown, in the present invention, it is possible to set the lowest limit altitude for a drone to fly (see Image 6 ) and the safe radius of flight (see Figure 7 ). For example in Image 6 , when the drone has flown to the lowest altitude, it will no longer respond to the remot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More