

Adaptive fault detection method for airplane rotation actuator driving device based on deep learning
A technology of rotary actuators and driving devices, which is applied in the direction of instruments, electrical testing/monitoring, testing/monitoring control systems, etc., to achieve the effect of increasing the number of layers, improving accuracy, and improving generalization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
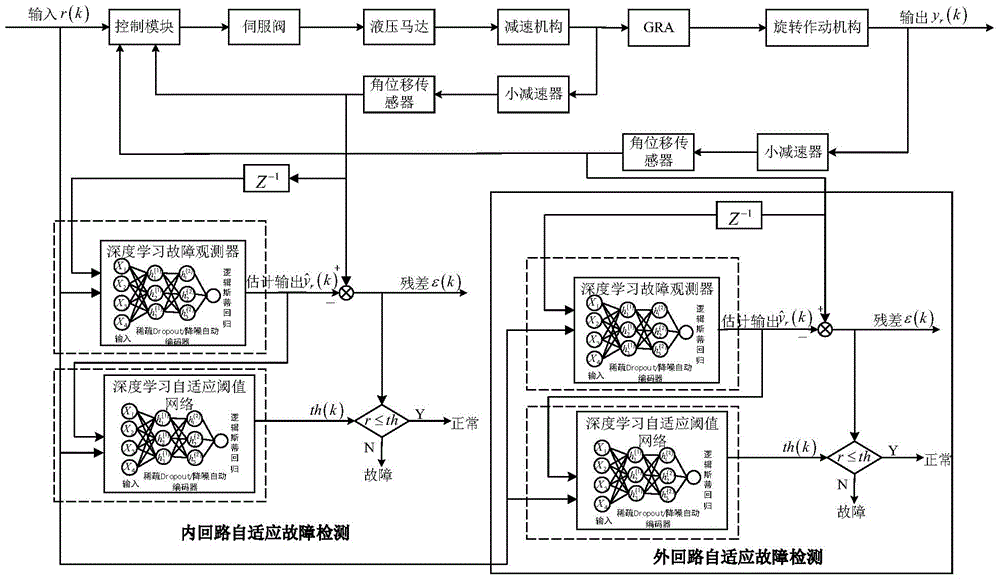
[0050] The invention discloses an adaptive fault detection method for an aircraft rotary actuator drive device based on deep learning. The method is based on deep learning of a sparse Dropout autoencoder, a stacked denoising autoencoder (Stacked Denoising Autoencoder) and Logistic regression. Adaptive fault detection for aircraft rotary actuator drives. On the basis of the fault analysis of the aircraft rotary actuator drive device, and aiming at the problems of the current classification algorithm with limited robustness and precision, this method draws on the relevant field knowledge of image pattern recognition, and adopts deep learning based on multi-layer neural network for self-identification. The known method realizes the self-expression of the original data under the condition of input partial occlusion by using the sparse Dropout autoencoder ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More