

Interference check device
A technology of interference checking and modeling, applied in the direction of program control manipulator, program control, electrical program control, etc., can solve the problem of increasing the remaining amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
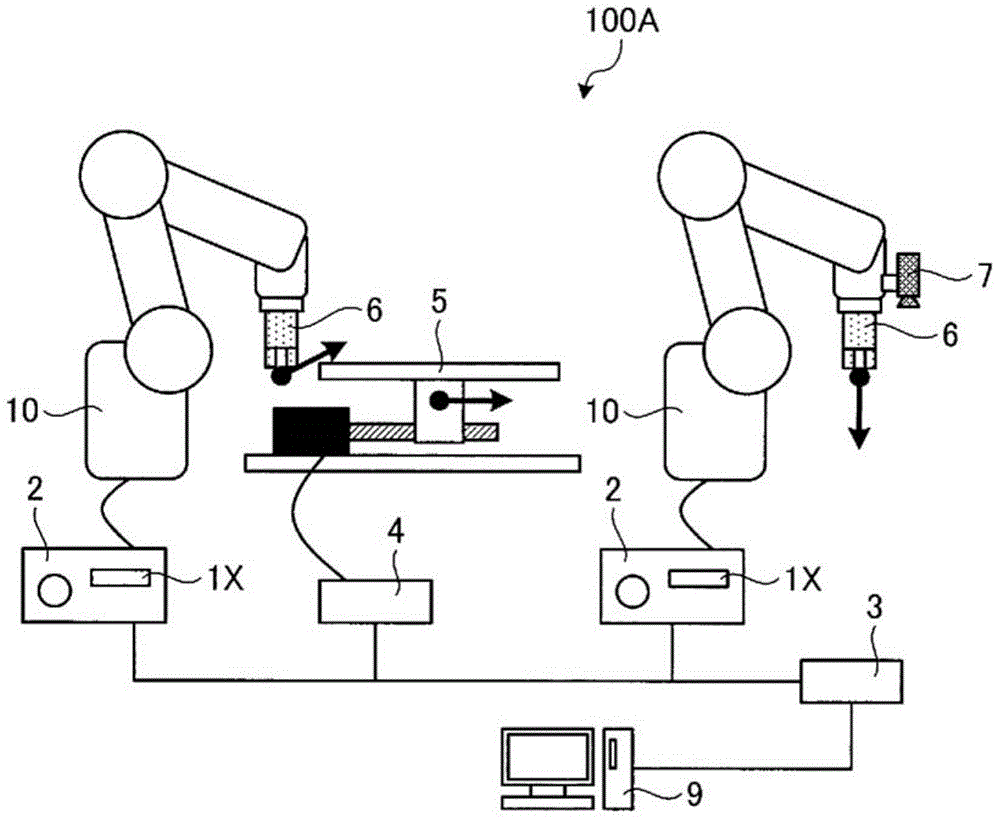
[0032] figure 1 It is a diagram showing the configuration of an interference checking system including the interference checking device according to the first embodiment. The interference checking system 100A is a system that includes the following components: a robot production system; a communication device 3 that connects devices in the robot production system; and a computer 9 that configures the controllers included in the robot production system. Make changes. In addition, the interference checking system 100A may include a control device such as a PLC (Programmable Logic Controller) instead of the communication device 3 , wherein the PLC has a communication function and a function of sending command values and signals to each device.
[0033] The communication device 3 performs communication within the interference checking system 100A using Ethernet (registered trademark) or the like. Specifically, the communication device 3 communicates with the robot controller 2...
Embodiment approach 2
[0138] Next, use Figure 10 Embodiment 2 of the present invention will be described. In Embodiment 2, instead of inputting the model upper limit from the model number upper limit input unit 12, the model upper limit 102 is derived based on the limit value (allowable model remaining 113) for the model remaining 104 in the interference checking device. Number 102 way.
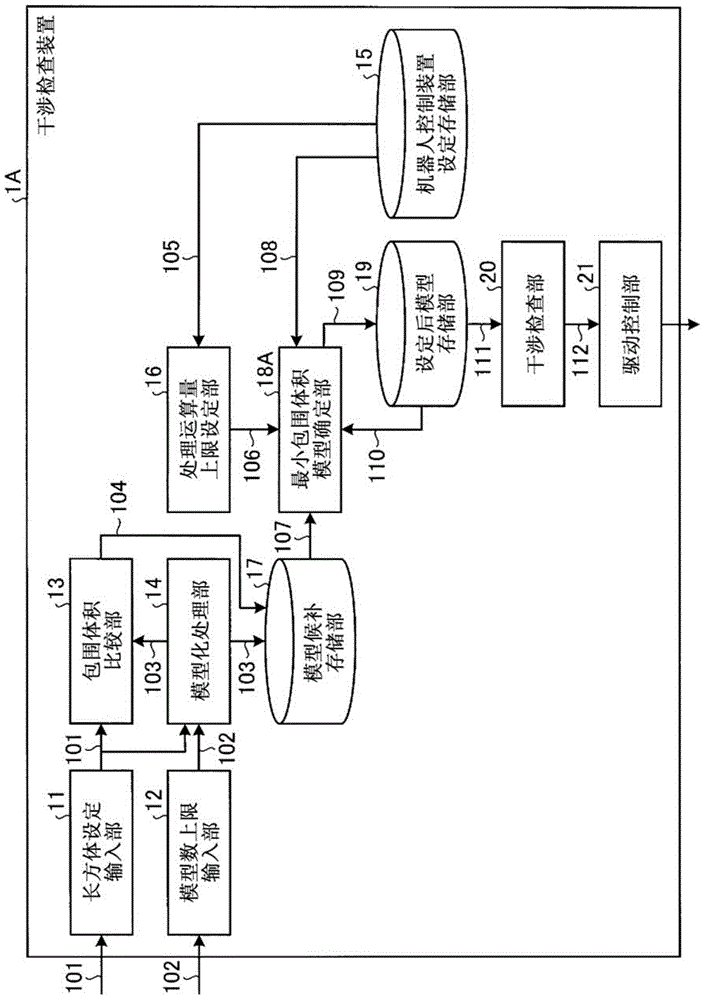
[0139] Figure 10 It is a block diagram showing the configuration of the interference checking device according to the second embodiment. Here, the configuration of an interference inspection device 1B as an example of the interference inspection device 1X will be described. exist Figure 10 Among the structural elements of the figure 2 Components having the same functions in the interference checking device 1A according to the first embodiment shown are denoted by the same reference numerals, and redundant descriptions are omitted.
[0140] The interference checking device 1B includes a cuboid setting inp...
Embodiment approach 3
[0151] Next, use Figure 11 ~ Figure 13 Embodiment 3 of the present invention will be described. In Embodiment 3, the generation part (part of the modeling processing part 14) of the cuboid used when the user performs modeling processing is automated by using 3D CAD (Computer Aided Design) information.
[0152] Figure 11 It is a diagram for explaining division processing for each set (module) using a CAD / CAM system. The modeling processing unit 14 of the present embodiment includes a CAD / CAM (CAD / CAE) system. The modeling processing unit 14 divides a pre-created three-dimensional model into a plurality of sets, and automatically converts each set into a cuboid model. exist Figure 11 3D model 81 shows a 3D model (modeled object) before conversion, and 3D model 82 shows a 3D model after converting each set into a cuboid model.
[0153] Figure 12 It is a block diagram showing the configuration of the interference checking device according to the third embodiment. Here, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More