Flexible tool dual driving mechanism for surgical robot
A surgical robot, dual-drive technology, used in surgery, medical science, diagnosis, etc., can solve the problems affecting the quality of patients' operations and the influence of doctors' operation and use, and achieve the effect of reducing volume and weight, convenient and practical operation, and improving operation rigidity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below in conjunction with specific embodiments and accompanying drawings.
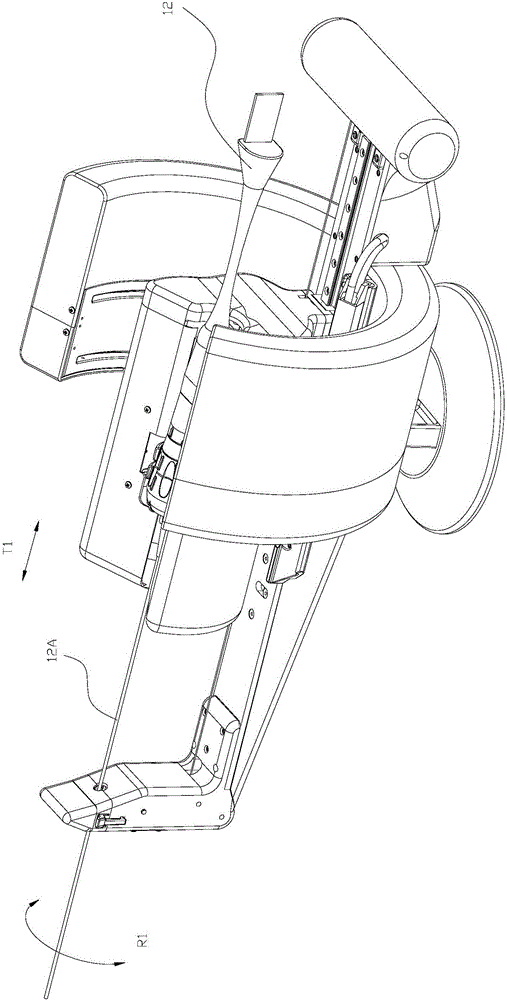
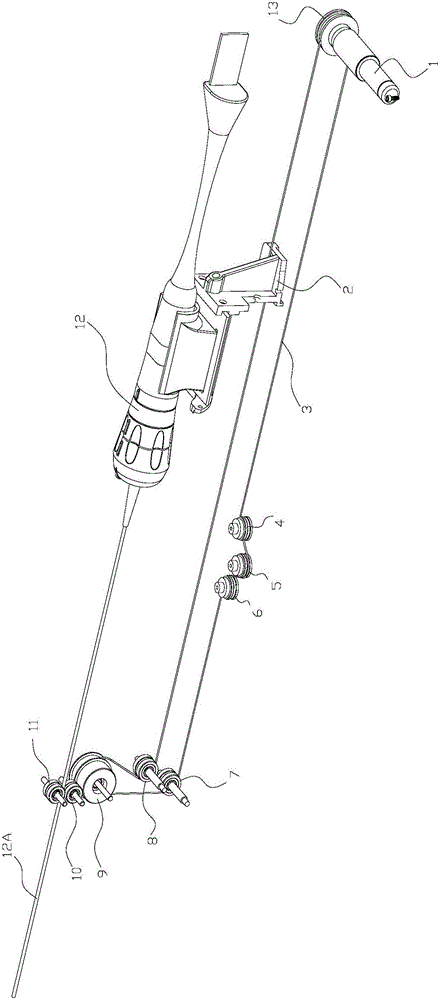
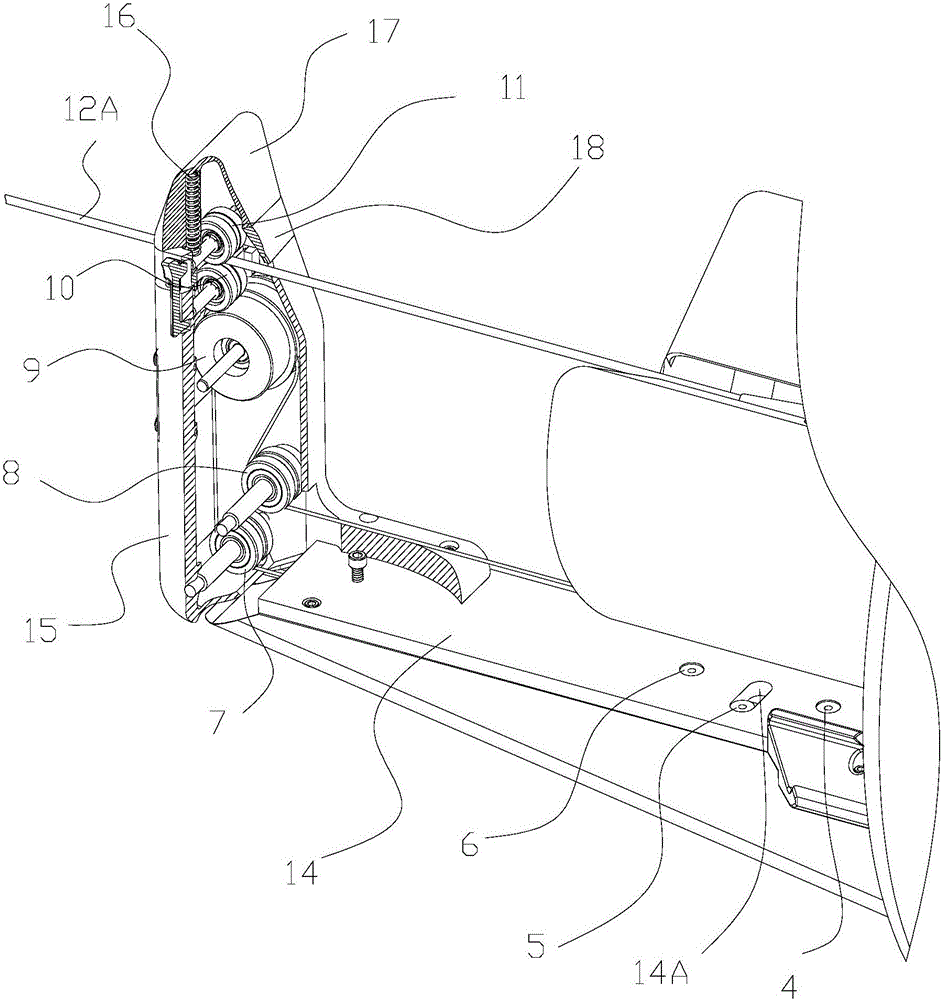
[0019] As shown in the accompanying drawings, the flexible tool double drive mechanism of the surgical robot of the present invention includes a horizontal connecting plate 14, on which a first driving bracket 2 is fixedly installed, on the first driving bracket 2 Used for clamping and installing flexible tools (such as urethroscopes, catheters, etc.), the motor 1 is installed at one end of the horizontal connecting plate 14 through the motor connecting seat 19 . On the output shaft of the motor 1 is fixedly connected a first driving wheel 13 whose rotating shaft is arranged along the horizontal direction.
[0020] A second drive bracket 15 is fixedly installed on the other end of the horizontal connecting plate 14, and first guide wheels that can rotate around their respective shafts are installed in the horizontal direction through the shaft fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com