Binocular vision measuring method
A binocular visual measurement and binocular technology, which is applied in the directions of measuring devices, photogrammetry/video metrology, surveying and navigation, etc., can solve the problems of high cost, difficult operation and analysis, inconvenient use, etc., and achieve the goal of equipment Undemanding, speed-increased, image-matching simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
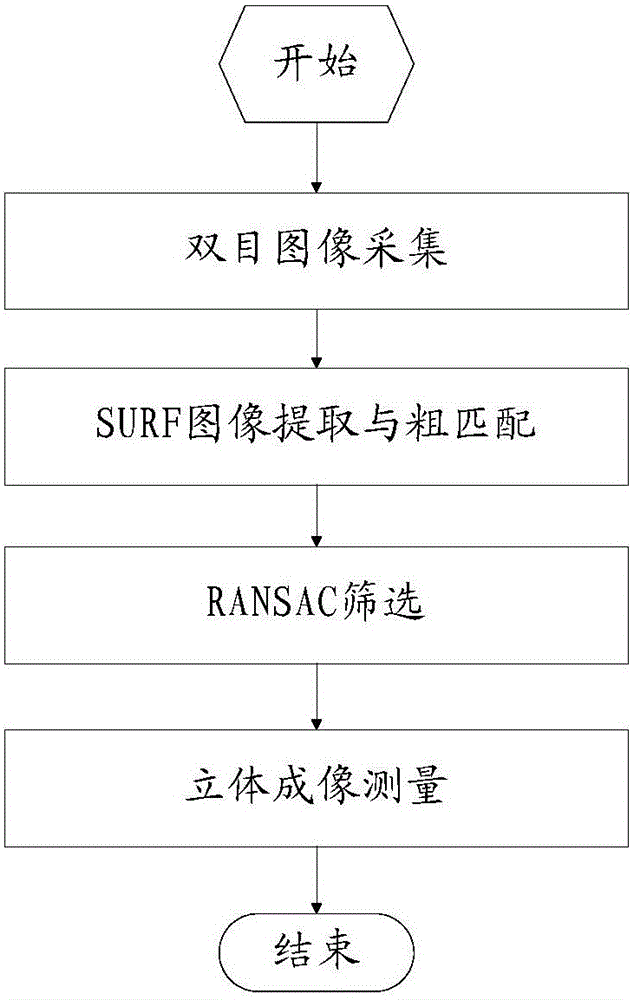
[0030] Such as figure 1 Shown, binocular vision measuring method of the present invention comprises:
[0031] Step 10, use the left and right cameras of the binocular camera to capture the same object at the same time for binocular image acquisition, and obtain two left and right images;
[0032] Step 20, using the SURF algorithm to extract feature points from the left and right images, and roughly matching feature point pairs;
[0033] Using the SURF algorithm to extract feature points from the left and right images is an existing technology. The SURF algorithm completes the matching of objects in the left and right images under moderate conditions and basically realizes real-time processing, which can achieve fast results. The above is based on the haar derivative of the integral image. In the present invention, the SURF algorithm uses the integral image to complete the convolution operation of the left and right images respectively, uses the Hessian matrix to detect the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



