

Single-wheel soil bin test stand
A test bench and soil trough technology, applied in the field of test benches, can solve the problems of wheel passing performance research, unsuitable for large off-road vehicles, etc., and achieve the effect of convenient measurement of test data and parameters, controllable conditions and environmental factors, and reduction of gaps.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
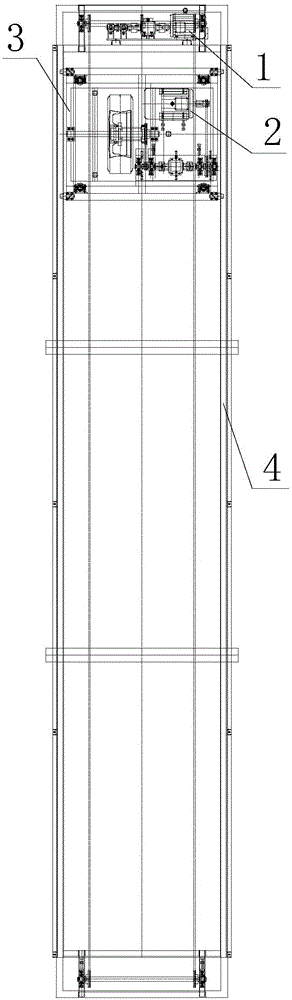
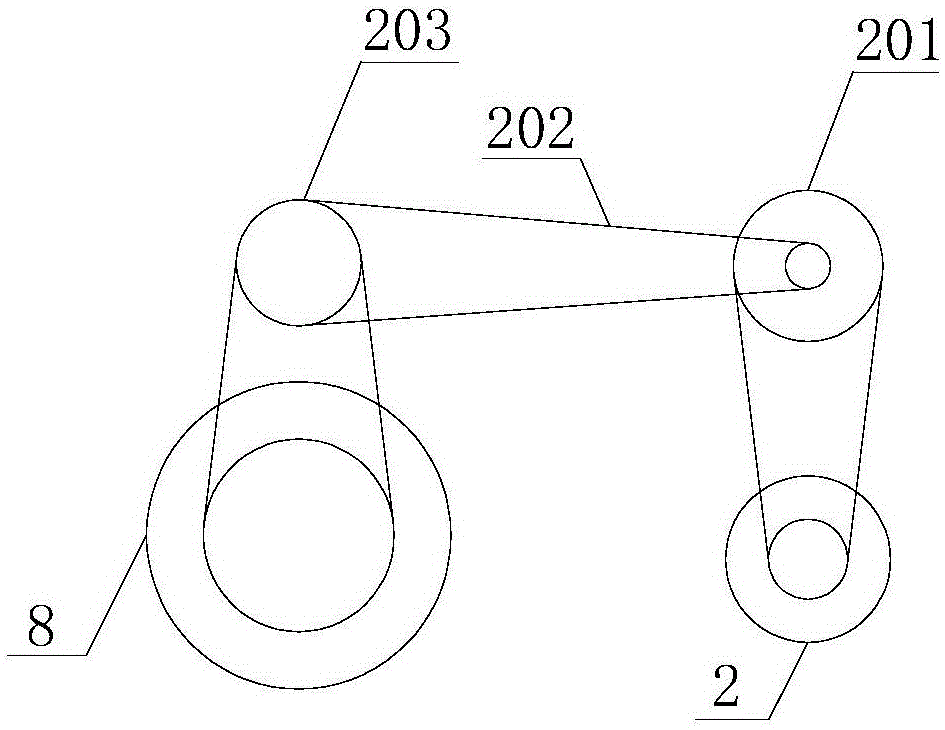
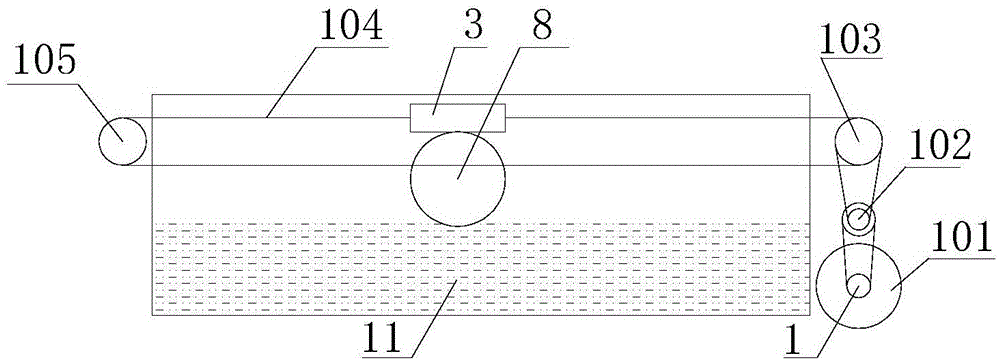
[0041] The single-wheel soil tank test bench of the present embodiment has a structure such as figure 1 , Figure 11 , Figure 12 , Figure 13 and Figure 14 As shown, it includes a soil tank system, a drive system, a drag system, a control system and a data acquisition system, wherein the soil tank system is mainly composed of a soil tank body 5 and a walking guide rail 4 arranged along the soil tank body 5, and the soil tank body 5 is Rectangular box structure, which is equipped with test soil 11, the size requirements of the box structure are as follows: its length should be determined as 9 meters according to the requirements of data collection in the stability test stage, the width should be determined as 1.5 meters according to the requirements of the drive system, and the depth should be 1.5 meters. Determined to be 0.8 meters, which can reduce the impact of soil boundary effects on the test. A first truss is arranged laterally in the box structure. The first truss ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More