

A spherical wheel mobile robot and its speed measurement method
A mobile robot, spherical wheel technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as errors, affecting control effects, robot instability, etc., to achieve the effects of high reliability, high measurement accuracy, and fast solution speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
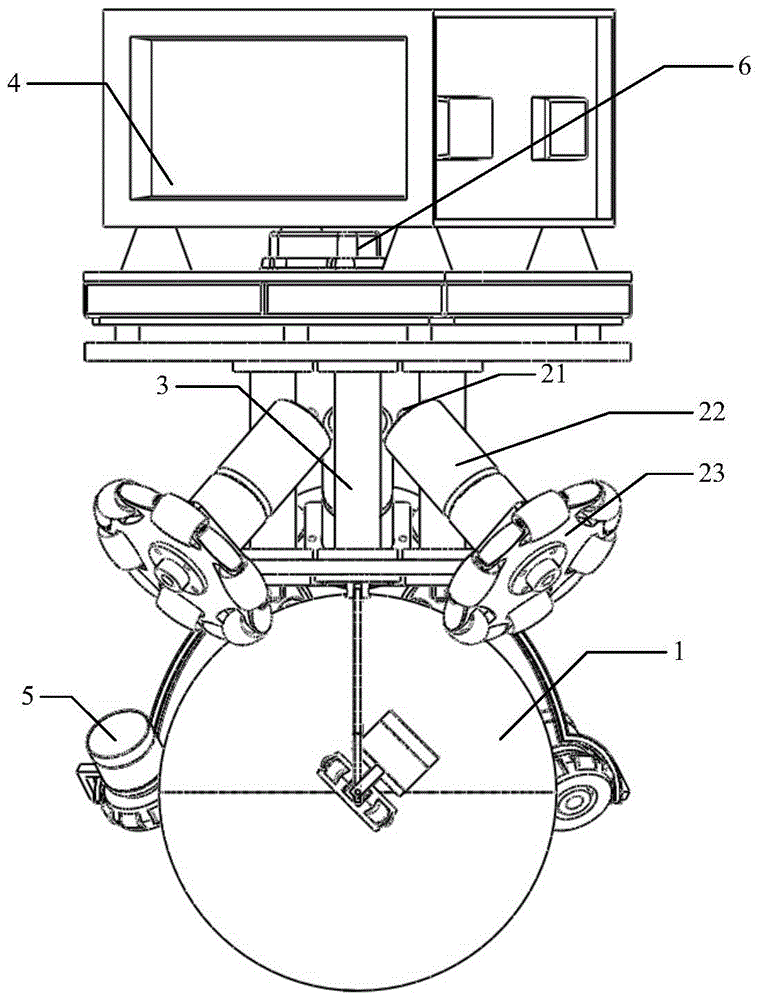
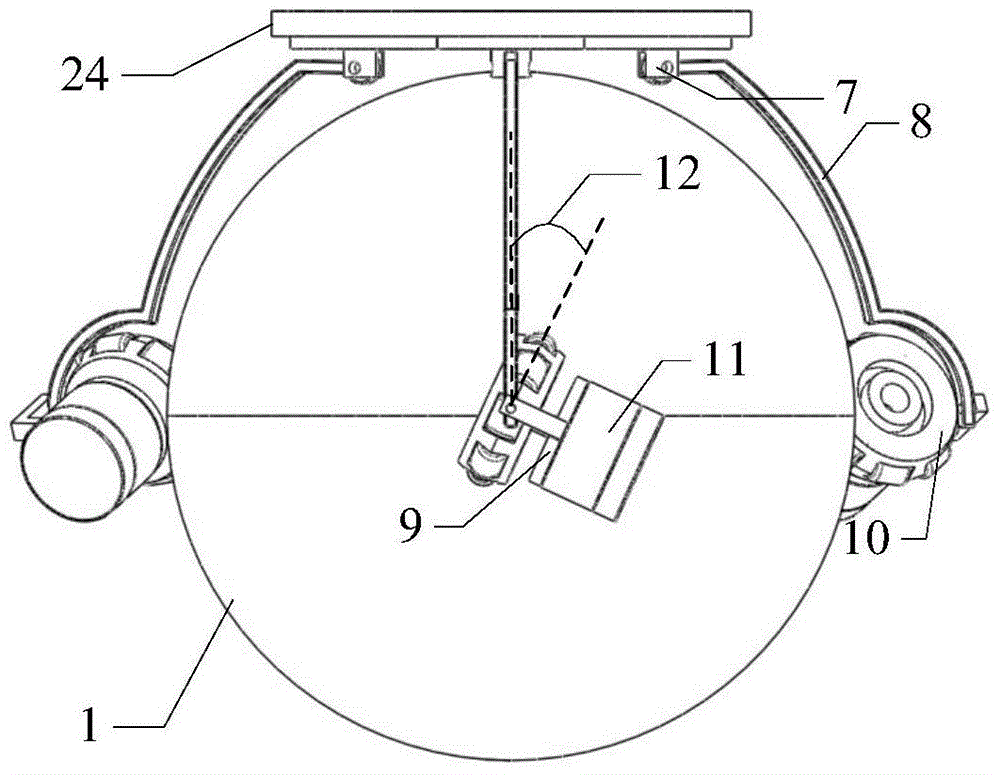
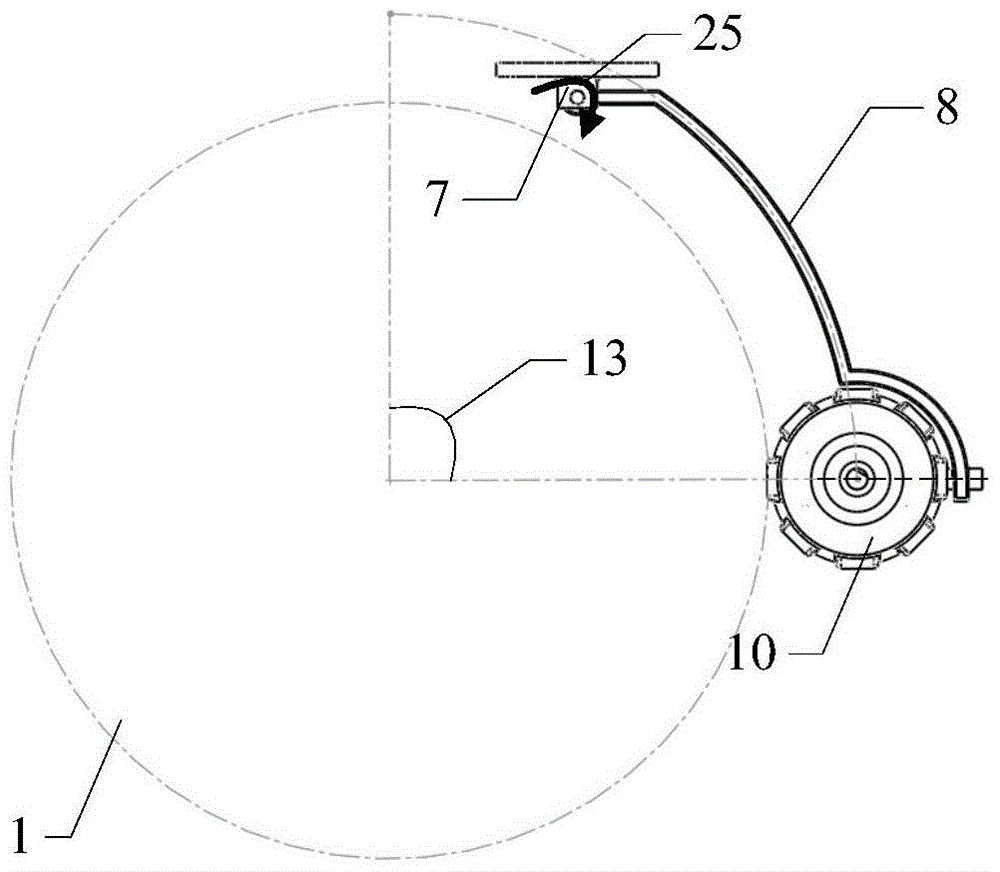
[0040] Such as figure 1 As shown, the spherical wheel mobile robot includes: a spherical wheel 1, three identical driving mechanisms 2, a body 3, a control module 4, three identical speed measuring mechanisms 5, and an inertial sensor 6;
[0041] The driving mechanism 2 includes: a driving motor encoder 21, a driving motor 22, and a universal driving wheel 23;
[0042] The control module 4 and the inertial sensor 6 are installed in the fuselage 3; three identical driving mechanisms 2 are symmetrically fixed on the chassis 24 of the fuselage 3, and are all tangent to the spherical wheel 1, as figure 1 shown in;
[0043] The speed measuring mechanism 5 detects the first angular velocity ω of the spherical wheel 1 relative to the fuselage 3 r1 ;
[0044] The inertial sensor 6 detects the attitude data of the fuselage 3, the attitude data mainly includes: the rotation speed ω relative to the ground gyr and the rotation matrix R ψθφ ;
[0045] The control module 4 analyzes the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More