

A method for autonomous and continuous planning of satellite missions
A mission and satellite technology, applied in three-dimensional position/channel control and other directions, can solve problems such as unsafe cancellation or delayed execution of satellite missions, and achieve the effect of ensuring continuous execution and reducing risks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
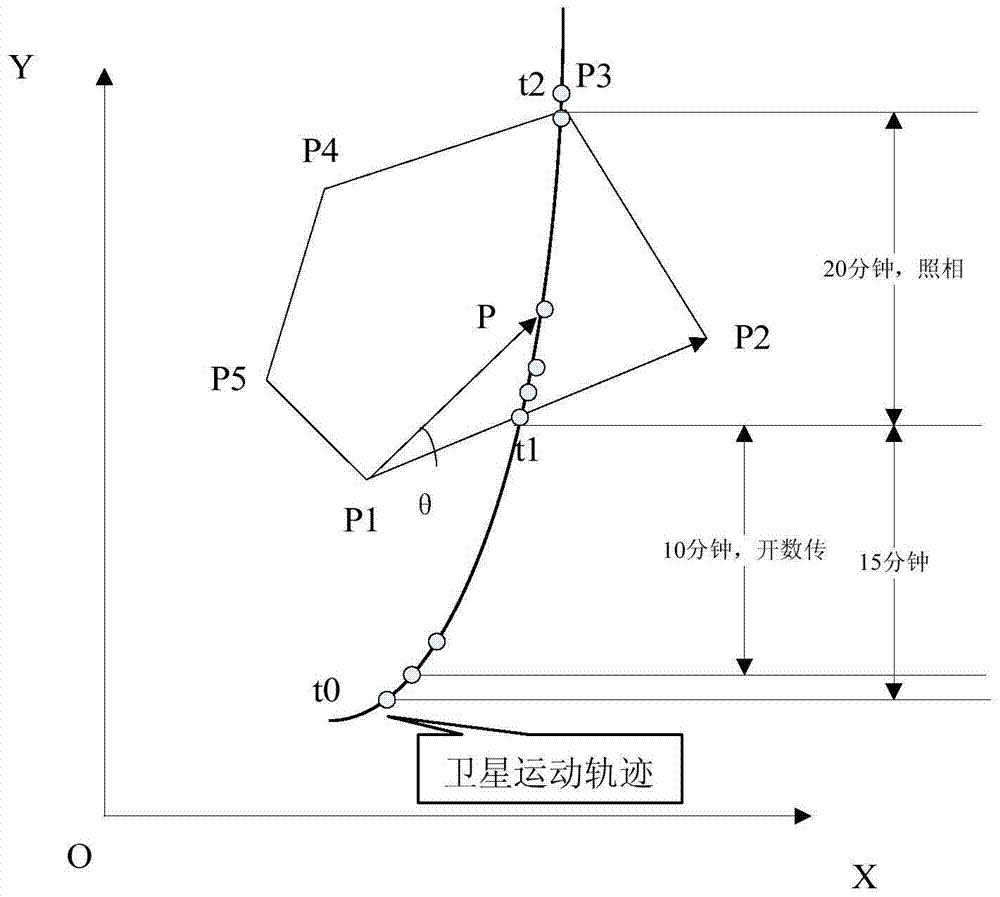
[0070] Embodiment 1: with figure 2 As shown, the satellite performs mission planning at time t0, and finds that the satellite will enter a specific area for work after 15 minutes. This is a short-term mission. At this time, analyze whether the resources and status of the satellite meet the mission start conditions. If so, it can be included in the new mission. task set P'. This mission needs to start the data transmission warm-up in advance, so the data transmission is turned on for warm-up 10 minutes before the mission execution. The time when the satellite enters the target control area is t1, which is the start time of the mission, and the payload equipment starts to start taking pictures. The moment when the satellite leaves the target control area is t2. At this time, the payload equipment is turned off, and the payload task ends. The work of the entire load task is driven by whether the satellite enters the target control area. The time length from t1 to t2 is 20 minut...
Embodiment 2
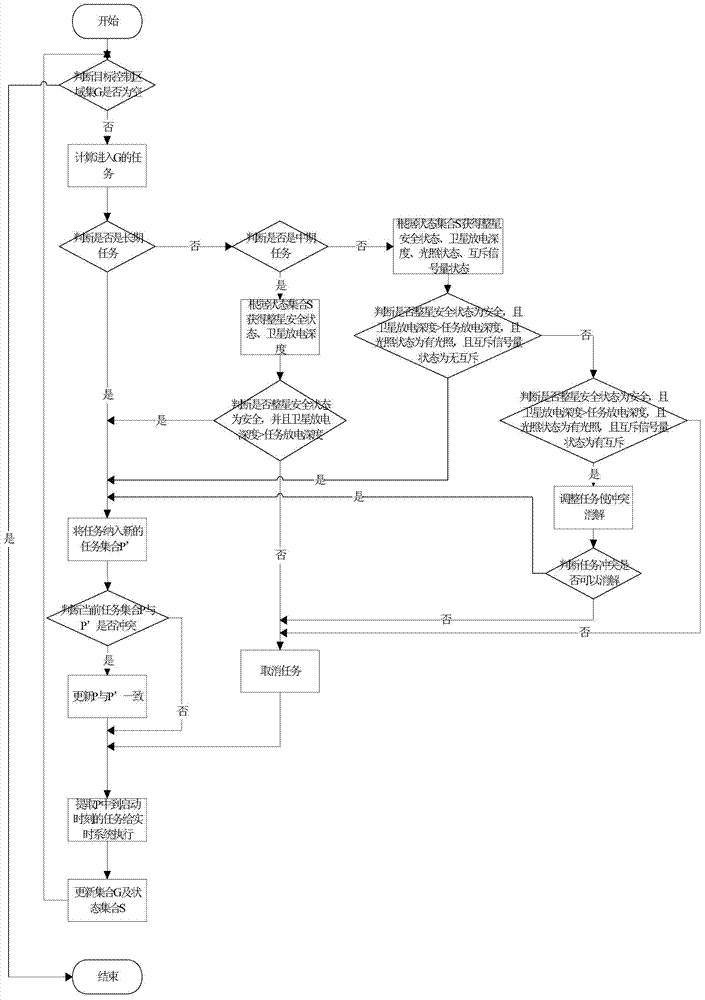
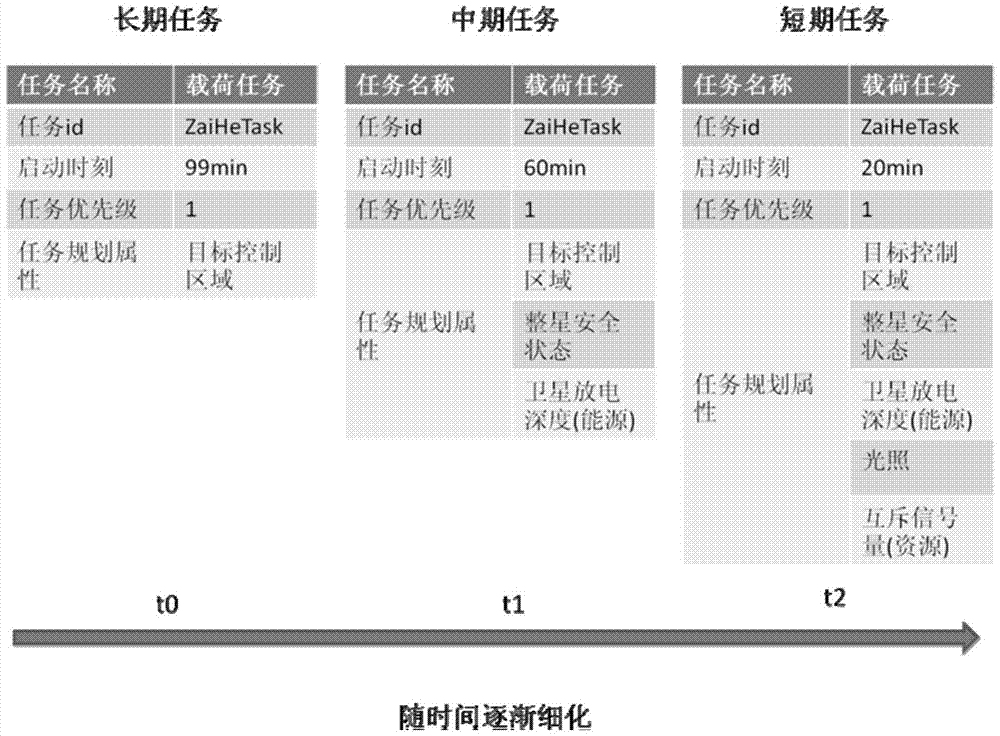
[0077] Embodiment 2: as image 3 As shown in , the satellite performs mission planning at a certain time t0, and plans the payload mission within 100 minutes. Assume that a load task with ID ZaiHeTask enters the target control area set G, and the start time is 99 minutes. At this time, it is a long-term task, which is directly included in the new task set P’. Every time the satellite performs mission planning between t0 and t1, the payload mission is a long-term mission, which is directly included in the new mission set P' until the time t1 is reached. At this time, when the task is planned, the starting time of the task becomes 60 minutes, and the task becomes a mid-term task. At this time, the task planning needs to be carried out in combination with the safety state of the whole satellite and the discharge depth of the satellite in the state set S. If the safety state of the whole star is If it is safe, and the discharge depth of the satellite is greater than the discharge...
Embodiment 3
[0080] Embodiment 3: Take the public resource "digital transmission" as an example, such as Figure 4 As shown, task 1 turns on data transmission at time T0 and turns off data transmission at time T2; task 2 turns on data transmission at time T1 and turns off data transmission at time T3. The execution process of the two tasks overlaps, and both use the "digital transmission" resource, and there is a resource conflict. If this resource conflict is not considered during task planning, and the two tasks are executed separately, for task 2, although the data transmission is turned on at T1, it is turned off by the command of task 1 at T2, so task 2 cannot work normally. implement. If the conflict resolution strategy is adopted, the task instructions can be adjusted during task planning, and the normal execution of the two tasks can be guaranteed without executing the "on data transmission" command of task 2 and the "off data transmission" command of task 1.
[0081] If two task...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More