

A two-degree-of-freedom vibration suppression system for high-altitude construction robot work platforms
A technology for construction robots and work platforms, which is applied in mechanical equipment, springs/shock absorbers, vibration suppression adjustment, etc. Effects of space and dynamics, good structural parameters, small condition number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
[0018] This embodiment provides a two-dimensional vibration suppression mechanism for a high-altitude construction robot work platform;
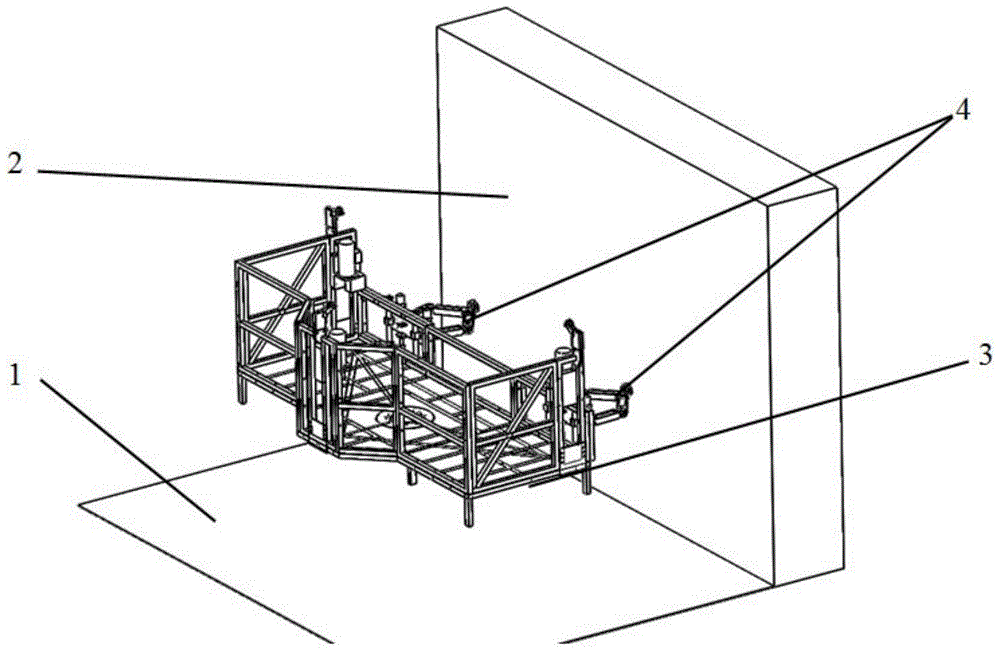
[0019] The working environment of the working platform 3 for the high-altitude construction robot includes the ground 1 and the working facade 2 parallel to the outer wall of the building. The overall assembly diagram of the two-dimensional vibration suppression mechanism and the working platform is as follows figure 1 shown;
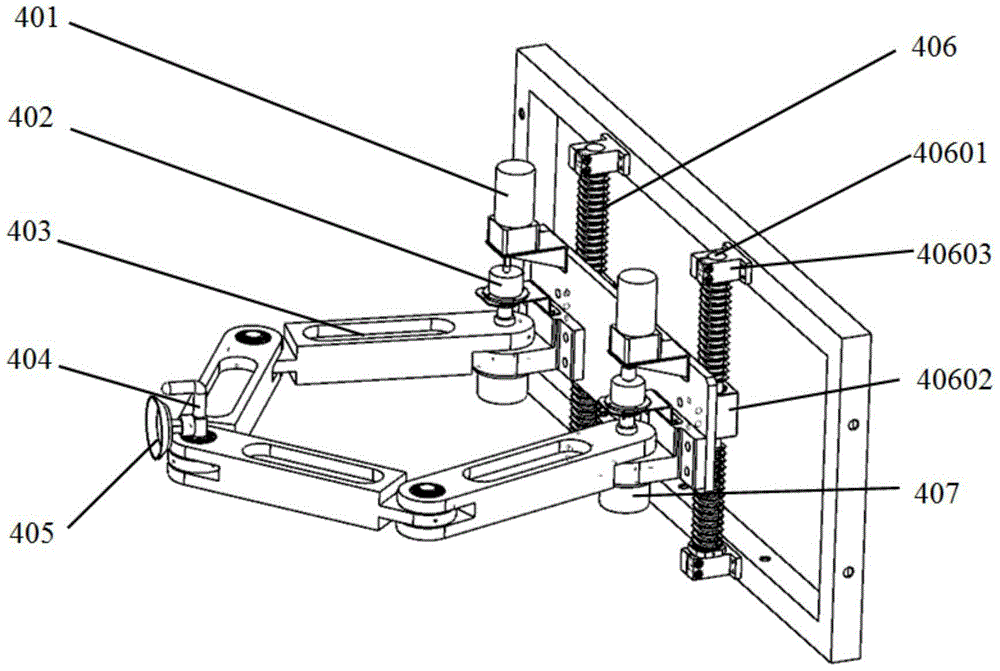
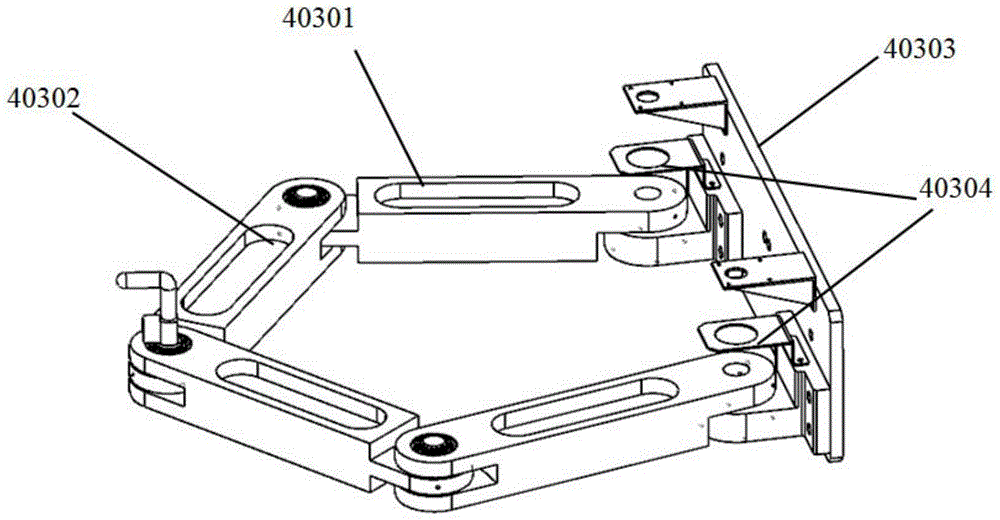
[0020] The two-dimensional vibration suppression mechanism 4 includes a force sensor 404, two equal-length active rods 40301, two equal-length driven rods 40302, a horizontal adjustment motor 401, a magnetic powder clutch 402, a rotary magneto-rheological damper 407, Mounting plate 40303, vertical damping mechanism 406, the inner surface of the mounting plate has t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More