

Robot tool coordinate system correction method
A technology of tool coordinate system and calibration method, applied in the field of calibration of industrial robot tool coordinate system, can solve the problems of error, large error, time-consuming and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
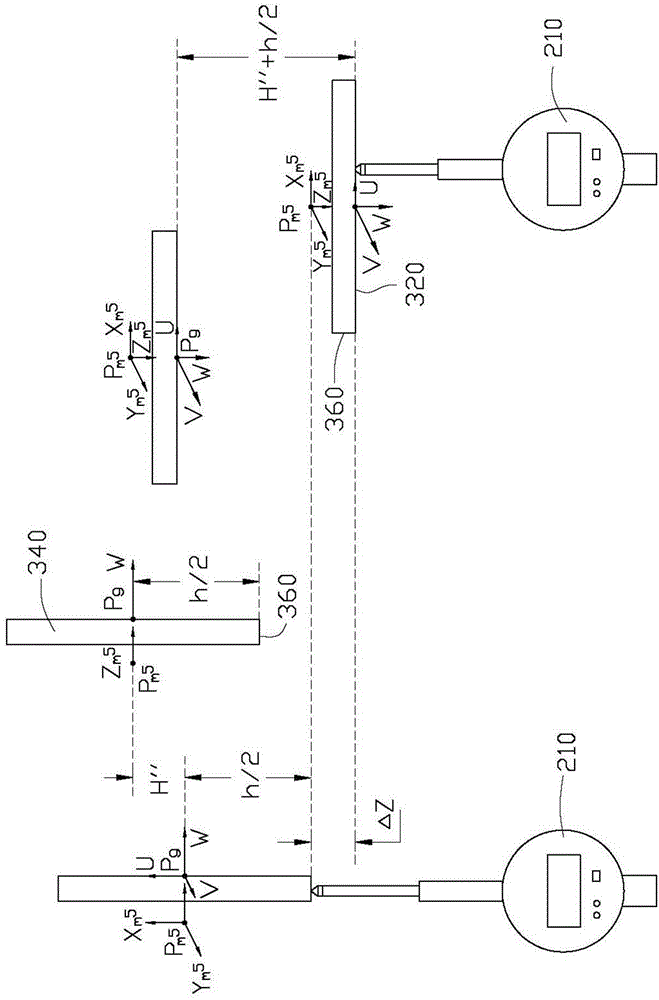
[0015] In practical applications, robots complete various operations by installing actuators (such as processing tools or clamping fixtures) at their ends. In this embodiment, the robot grabs the workpiece through the actuator for processing. Before processing, it is usually necessary to define a tool coordinate system on the workpiece grabbed by the actuator. The accuracy of the tool coordinate system directly affects the precise operation of the robot. In this embodiment, the coordinate system where the workpiece is located is the actual tool coordinate system, and the robot defines a basic tool coordinate system to obtain the actual tool coordinate system of the workpiece grasped by the robot. The correction of the tool coordinate system of the workpiece on the robot by using the robot tool coordinate system correction method of the present invention will be described in detail below.
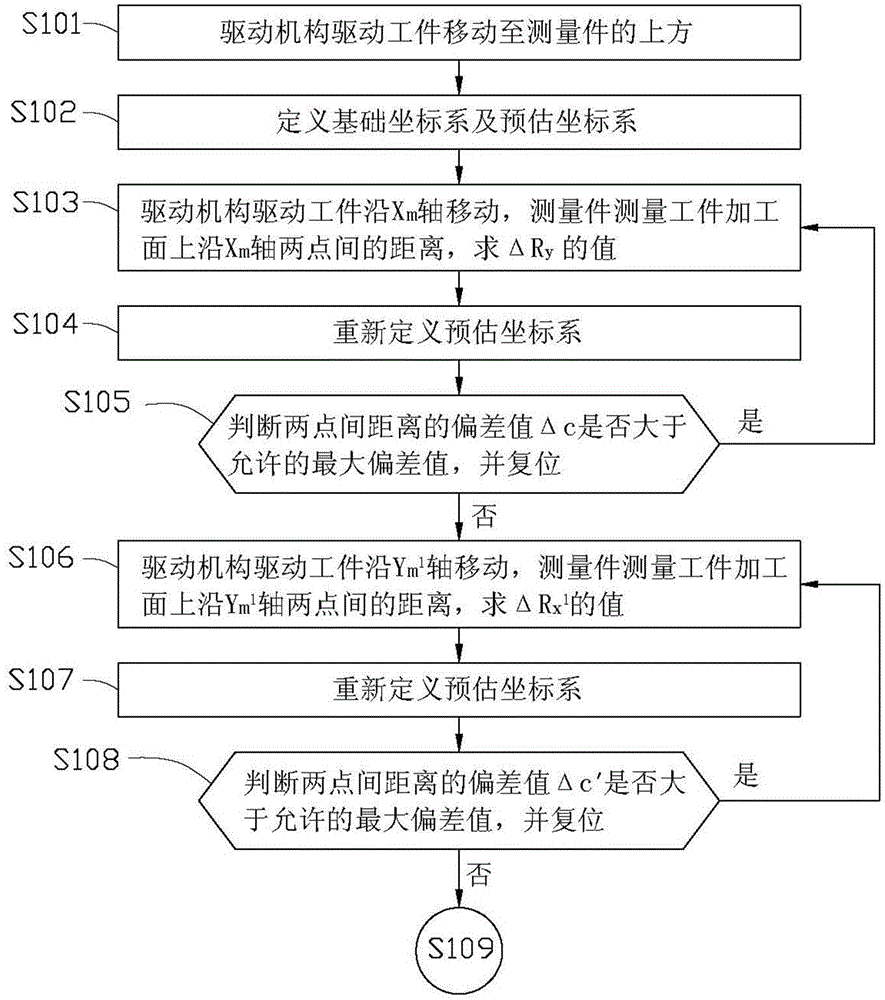
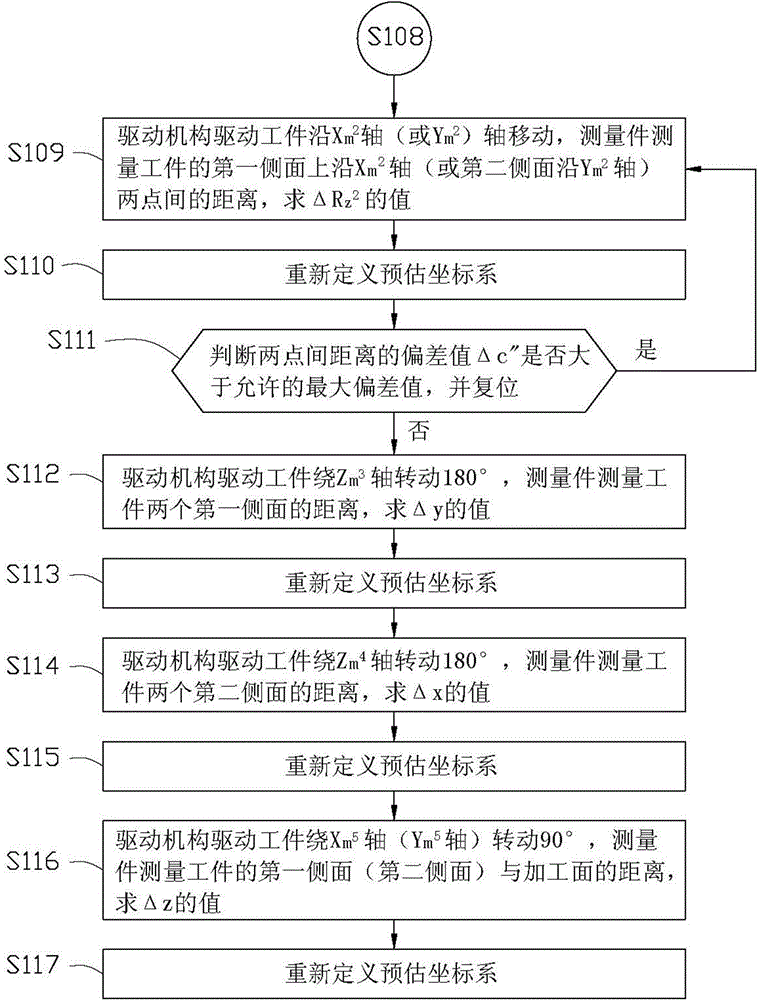
[0016] see Figure 1 to Figure 3 In the robot tool coordinate system calibration method...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More