

Single-core low-speed two-wheeled picomouse sprint controller
A micro-mouse and controller technology, applied in two-dimensional position/channel control and other directions, to achieve the effect of solving impact, simple control, and strong program portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
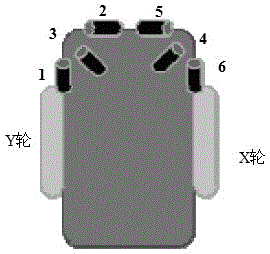
[0046] Embodiment 1: Single-core low-speed two-wheel Pico mouse sprint controller, including STM32F4 controller, L6207D chip, battery, first sensor S1, second sensor S2, third sensor S5, fourth sensor S6, gyroscope G1, second sensor A motor X, a second motor Y, a third motor M, a gyroscope G1, a current sensor and a vacuum device, the current sensor is connected to the signal of the L6207D chip and connected to the signal of the STM32F4 controller, the signal of the STM32F4 controller is connected to the L6207D chip, the first The sensor S1, the second sensor S2, the third sensor S5 and the fourth sensor S6 are all located on one side of the upper part of the two-wheeled pico mouse, two of the sensor signals are emitted in the same direction as the wheel, and the other two sensor signals are emitted in the same direction as the wheel. There is a certain angle between the traveling directions, two of the three motors are respectively connected to the two wheels of the two-wheel ...
Embodiment 2
[0051] Embodiment 2 differs from Embodiment 1 in that: the angle between the sensor signal emission direction of the first sensor S1 and the sensor signal emission direction of the second sensor S2 is greater than or equal to 75° and less than or equal to 90°; the third sensor S5, The included angle between the sensor signal emission directions of the fourth sensor S6 is greater than or equal to 75° and less than or equal to 90°. In this way, there is less interference between the sensors and the measurement is more accurate. exist When the included angle is greater than or equal to 75° and less than 90°, Sensor S2 and sensor S5 can also accurately measure the change from having a retaining wall to no retaining wall and from no retaining wall to having a retaining wall. The sensor signal change at this position can be captured by the controller, and then at this position can be Precise and intelligent compensation for picomouse. while in When the included angle is equal to...
Embodiment 3
[0052] Embodiment 3, the difference from Embodiment 1 is that the two motors corresponding to the two wheels are the first motor X and the second motor Y, and both the first motor X and the second motor Y are permanent magnet DC motors, driving vacuum The motor of the device is a third motor M and the third motor is a DC motor.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More