

Intelligent mobile operation arm having mechanical testing function
A technology for testing functions and mobile operations, applied in the direction of manufacturing tools, manipulators, etc., can solve the problem that the platform cannot realize the coordinated work of the mobile platform and the working manipulator, is not conducive to ensuring the safety of the working mechanism and human, and cannot measure the contact force between the device and the working end. and other issues to achieve the effect of maximizing, protecting people's safety, and achieving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
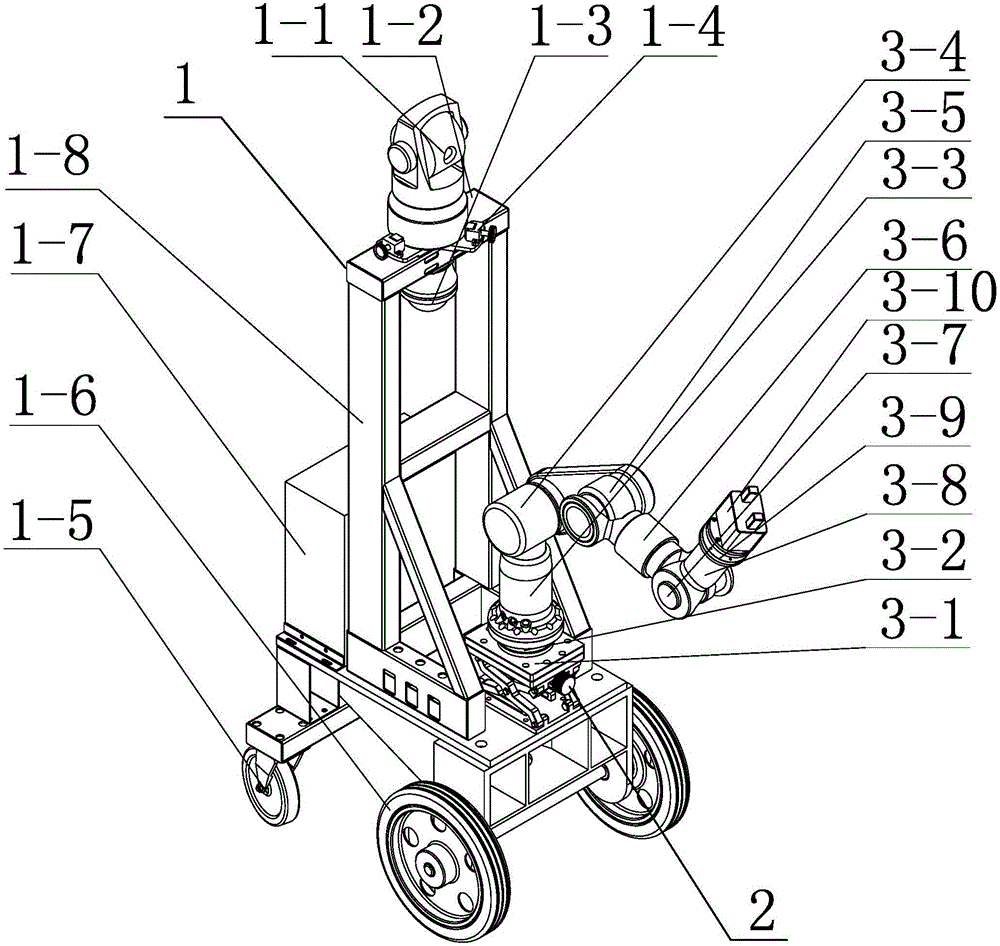
[0016] Specific embodiment one: combine 1 to Figure 8 Describe this embodiment, a kind of intelligent mobile operation arm with mechanical test function of this embodiment comprises mobile platform 1, mechanical arm lifting device 2 and mechanical arm 3, and mechanical arm lifting device 2 is installed on the mobile platform 1 by screw, mechanical The arm 3 is installed on the mechanical arm lifting device 2,
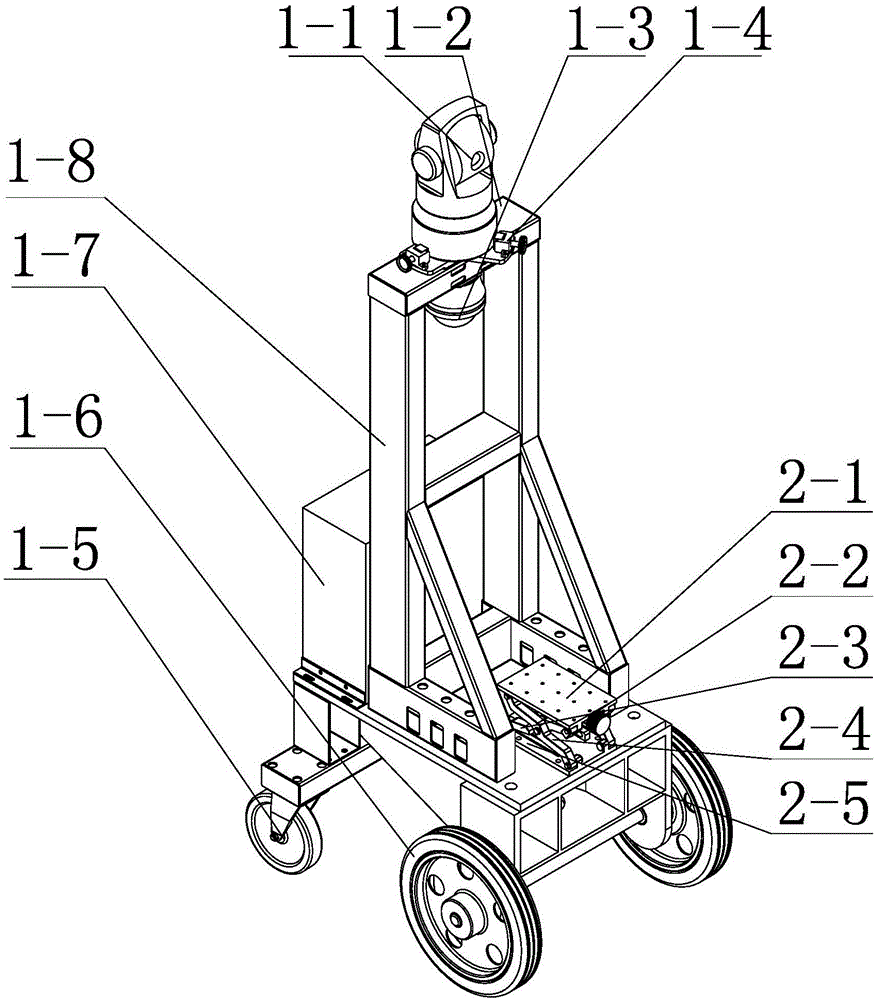
[0017] The mobile platform 1 includes a laser tracker 1-1, a load bracket 1-2, a camera 1-3, a control box 1-7, a platform bracket 1-8 and moving wheels, and the load bracket 1-2 is welded on the platform bracket 1-8 , the laser tracker 1-1 is installed on the upper end of the load bracket 1-2, the camera 1-3 is installed on the lower end of the load bracket 1-2, the control box 1-7 is installed on the side of the platform bracket 1-8, and the moving wheel is installed At the bottom end of the platform support 1-8,
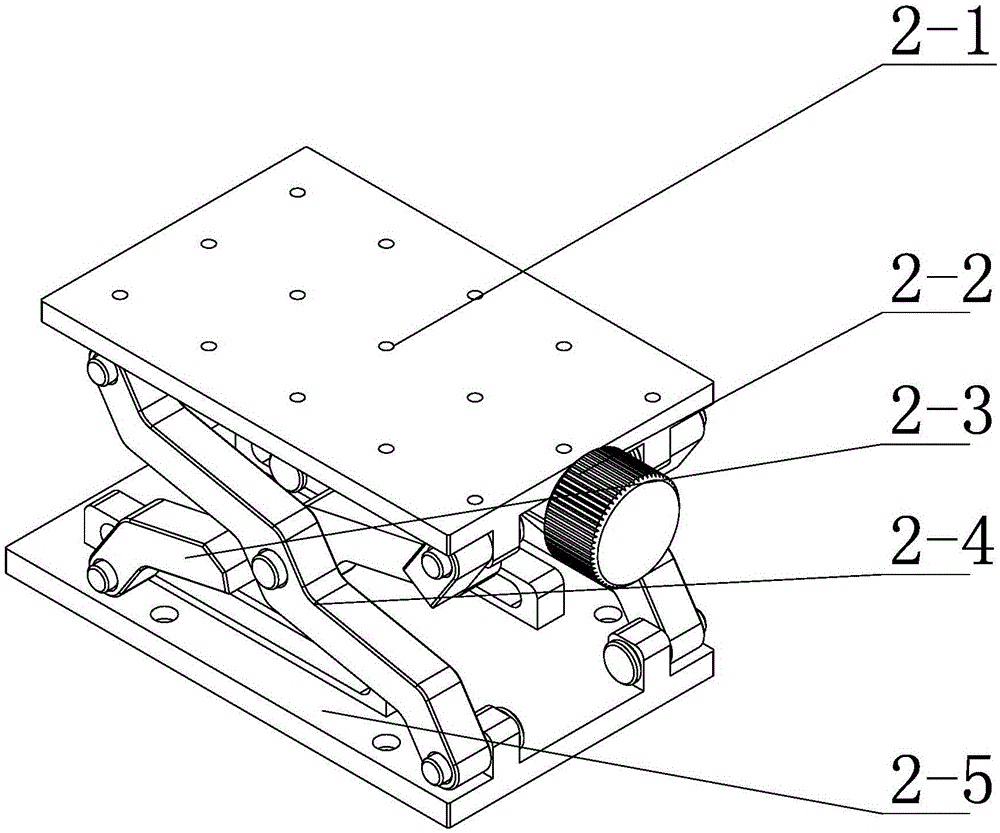
[0018] The mechanical arm lifting device 2 include...
specific Embodiment approach 2
[0021] Specific implementation mode two: combination figure 1 and figure 2 To illustrate this embodiment, the mobile platform 1 of this embodiment further includes a plurality of claw seats 1-4, and the laser tracker 1-1 is installed on the upper end of the load bracket 1-2 through the plurality of claw seats 1-4. It is convenient for connection, and realizes the locking of the laser tracker 1-1. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0022] Specific implementation mode three: combination figure 1 and figure 2 Describe this embodiment, the mobile wheel of this embodiment comprises two front wheels 1-6 and two rear wheels 1-5, and two front wheels 1-6 and two rear wheels 1-5 are installed in sequence from front to back The bottom end of the platform support 1-8. Movement is more flexible. Other compositions and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More