

Mechanical arm
A technology of manipulators and mechanical arms, applied in the field of manipulators, can solve the problems of structural balance of large-sized manipulators, and achieve the effect of shortening the size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
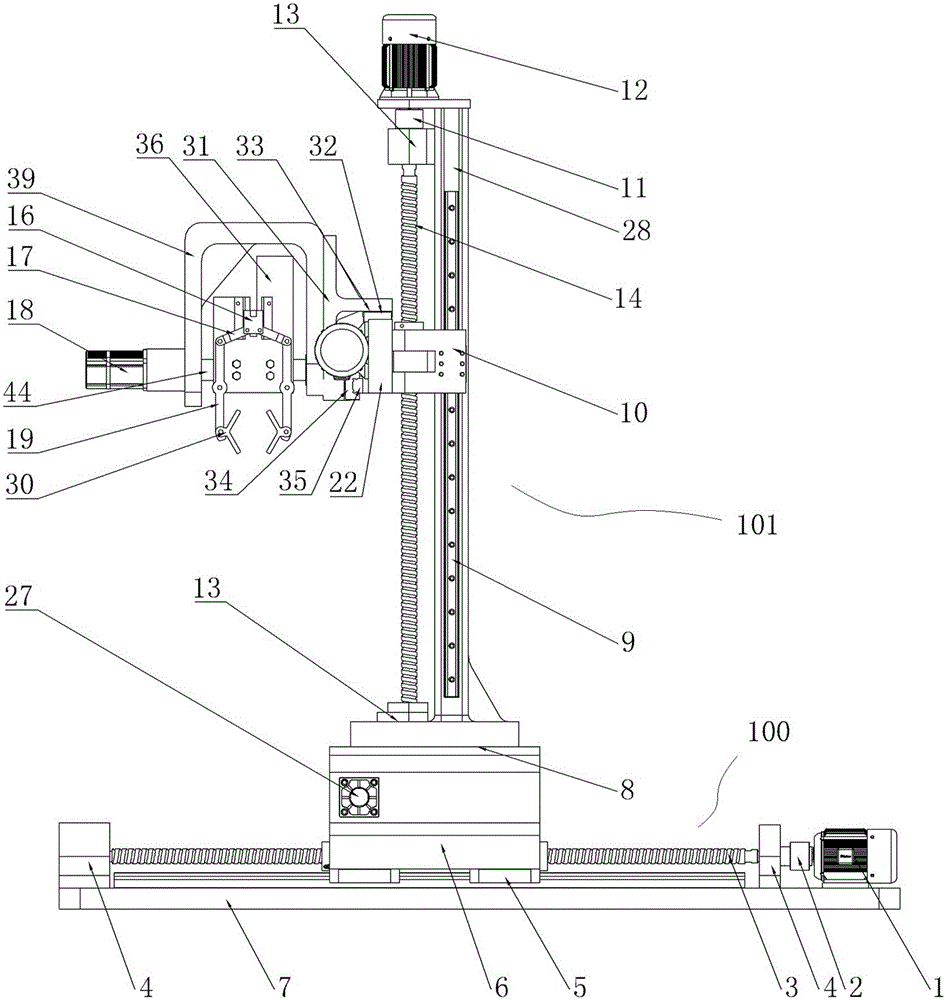
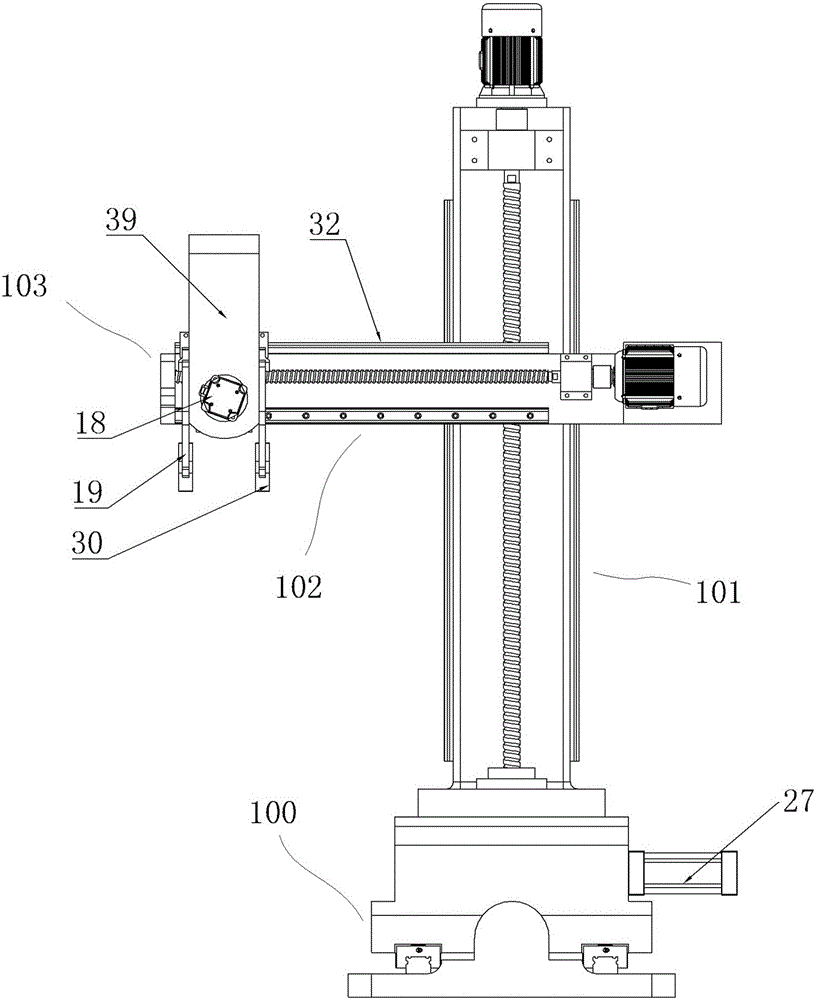
[0029] Embodiment 1 of the manipulator of the present invention, as Figure 2-9 As shown, the manipulator includes a linear arm and a gripper 103. The linear arm includes a first linear arm 100, a second linear arm 101 perpendicular to the first linear arm, and a third linear arm 102 perpendicular to the first and second linear arms. , the first linear arm 100 includes a base 7 whose length extends along the X-axis direction. The two ends of the base 7 are provided with a first lead screw mount 4, and the first lead screw mount 4 is rotatably equipped with a base extending along the X-axis direction. The first lead screw 3, one end of the first lead screw 3 is connected with the first servo motor 1 through the first coupling 2, the first lead screw 3 is movably equipped with a first nut seat 6, and the first nut seat 6 and Between the base 7, a slide rail structure is provided on both sides of the lead screw. The slide rail structure includes a first linear guide rail 20 fixed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More