

Single-camera-based gesture convex hull detection and palm positioning method
A monocular camera and positioning method technology, applied in the field of gesture convex hull detection and palm positioning based on monocular camera, can solve the problem of uncertain ambient lighting conditions, lack of gesture convex hull detection and palm positioning methods of monocular camera, background complex environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below through specific embodiments and in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
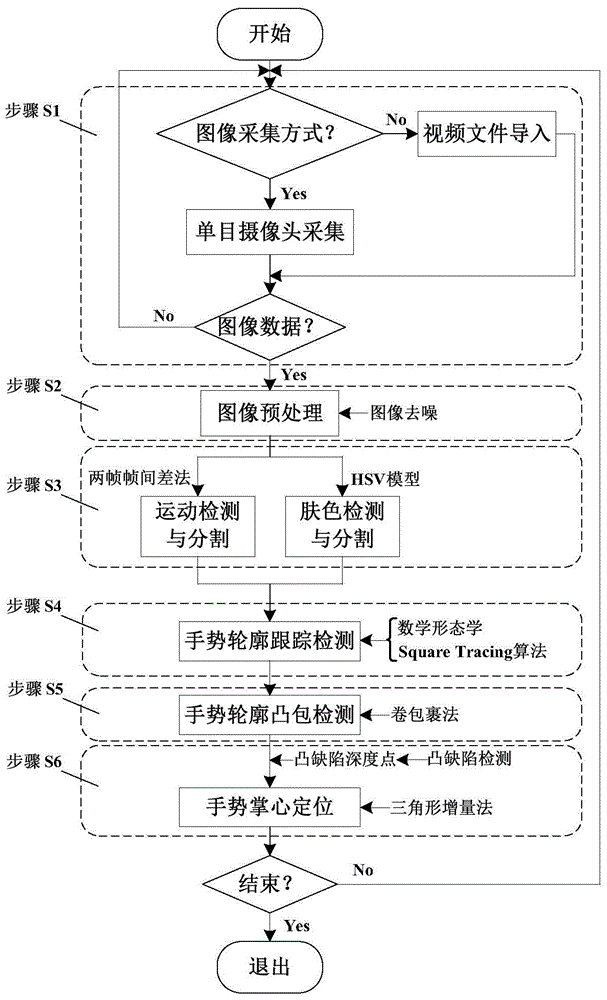
[0058] A method of gesture convex hull detection and palm positioning based on a monocular camera implemented according to the present invention is as follows: Figure 1-8 shown. Specifically include the following steps:
[0059] Step S1: collection of gesture images, collecting gesture image data through a monocular RGB camera (such as a monocular RGB camera model of Logitech C270);
[0060] Step S2: Preprocessing of collected images, processing the collected gesture raw image data by image denoising, mathematical morphology and other methods
[0061] After the gesture imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More