Belt wheel structure for robot
A robot and pulley technology, applied in the field of manipulators, can solve the problems that the belt tension is not easy to be too tight, does not use pulleys for transmission, and affects the life of the belt, and achieves the effect of compact installation structure, wide applicability, and guaranteed service life.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the technical solutions of the present invention are further described, but the present invention is not limited to these embodiments.
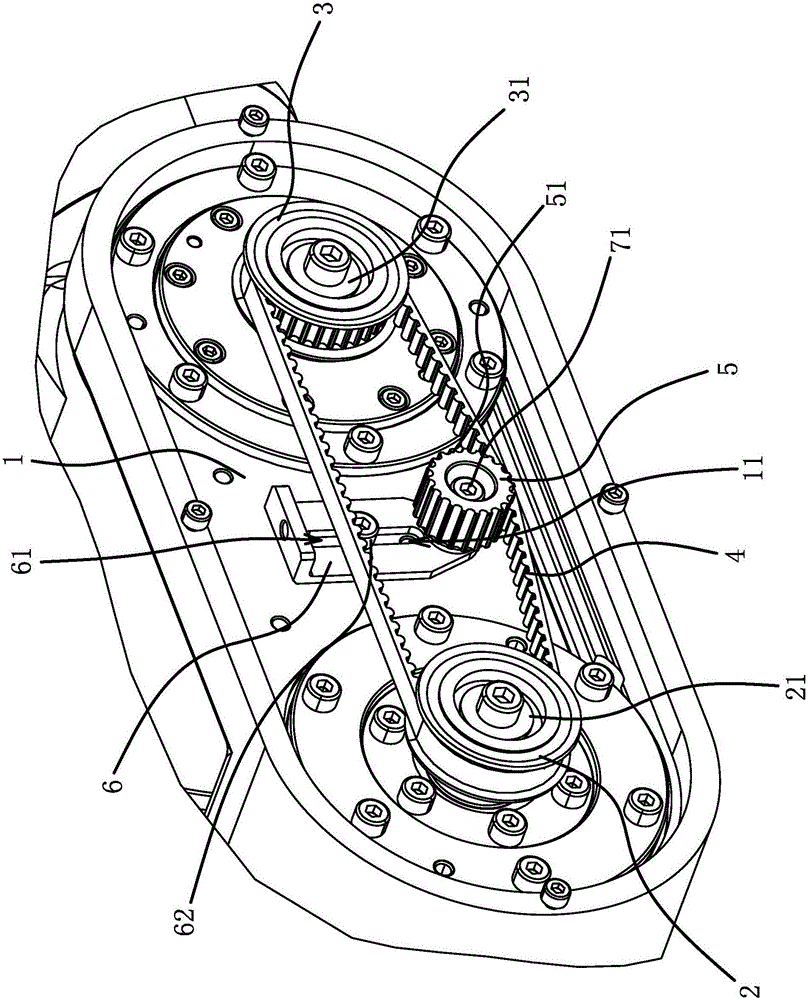
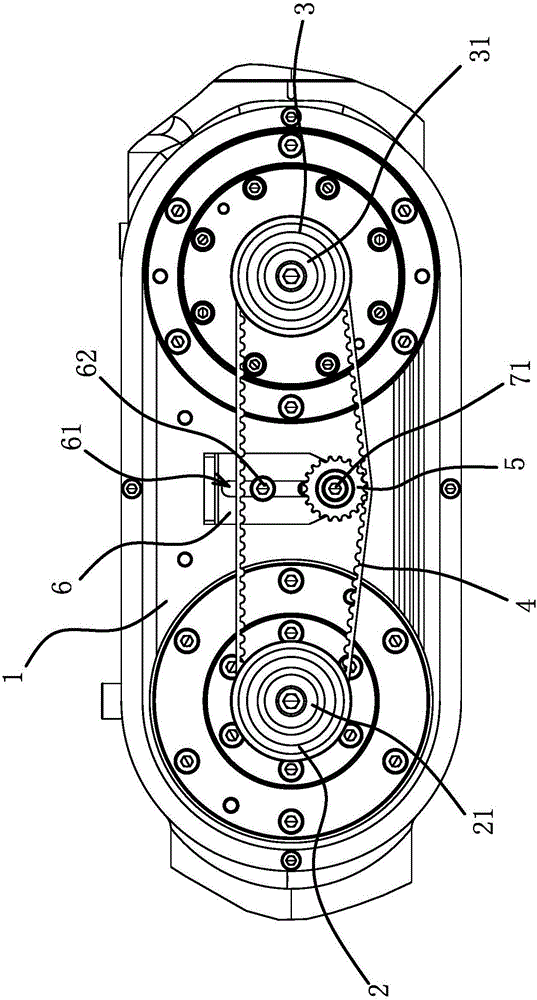
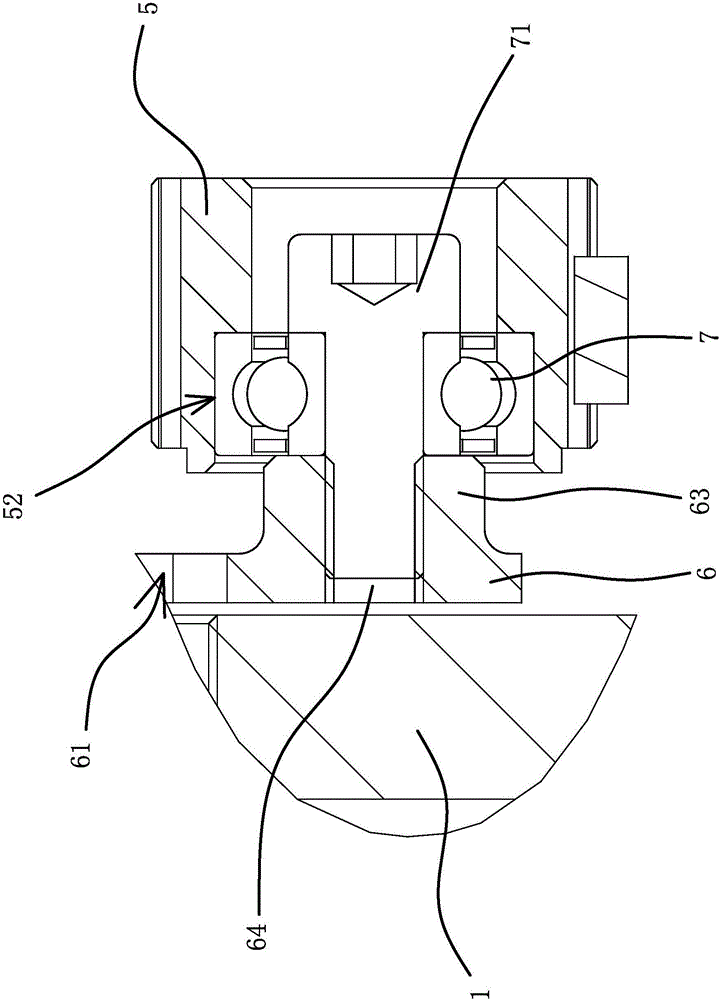
[0021] This example Figure 1 to Figure 3 As shown, the robot includes a joint 1 connecting the mechanical arm, and the pulley structure of the robot includes a driving pulley 2 connected to a drive shaft 21, a driven pulley 3 connected to a driven shaft 31, and a drive pulley 2 and a driven pulley 3 connected to each other. The toothed belt 4 between the driven pulleys, the driving pulley 2 and the driven pulley 3 are all arranged in the joint 1 and the distance between the driving pulley 2 and the driven pulley 3 is fixed, and the driving pulley is located in the joint 1 2 and the driven pulley 3 are also provided with an auxiliary pulley 5 with gear teeth 51, the auxiliary pulley 5 is located on the inner side of the to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More