

Indoor mobile robot pose measurement system and measurement method based on optoelectronic scanning
一种移动机器人、位姿测量的技术,应用在无线电波测量系统、非电动变量控制、测量距离等方向,能够解决现场环境要求较高、移动机器人工作区域大、坐标系全局定向步骤繁琐等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The photoelectric scanning-based indoor mobile robot pose measurement system and measurement method of the present invention will be described in detail below in conjunction with the embodiments and drawings.
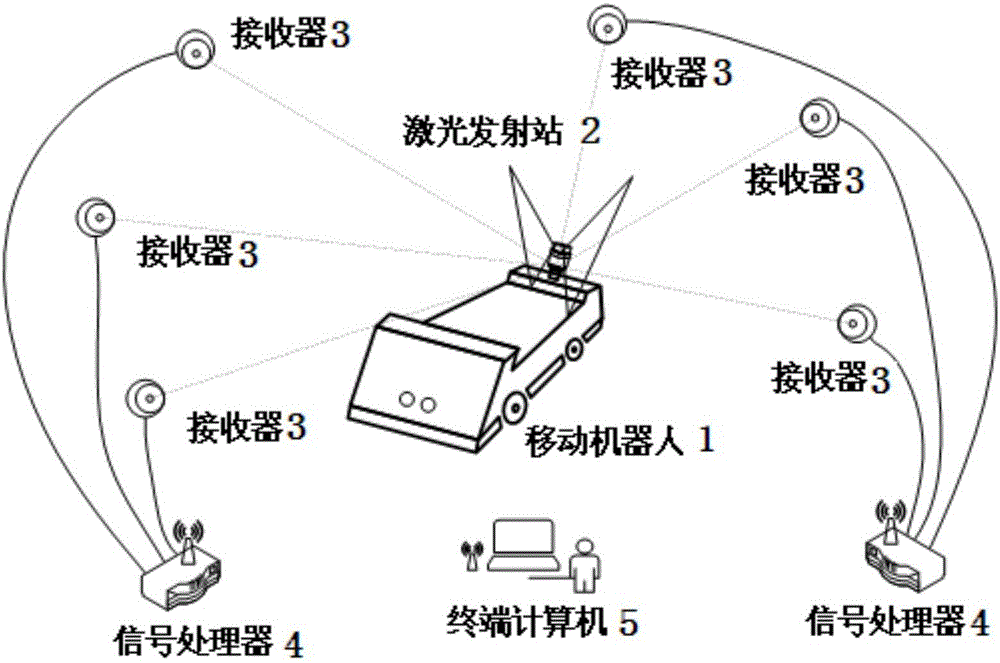
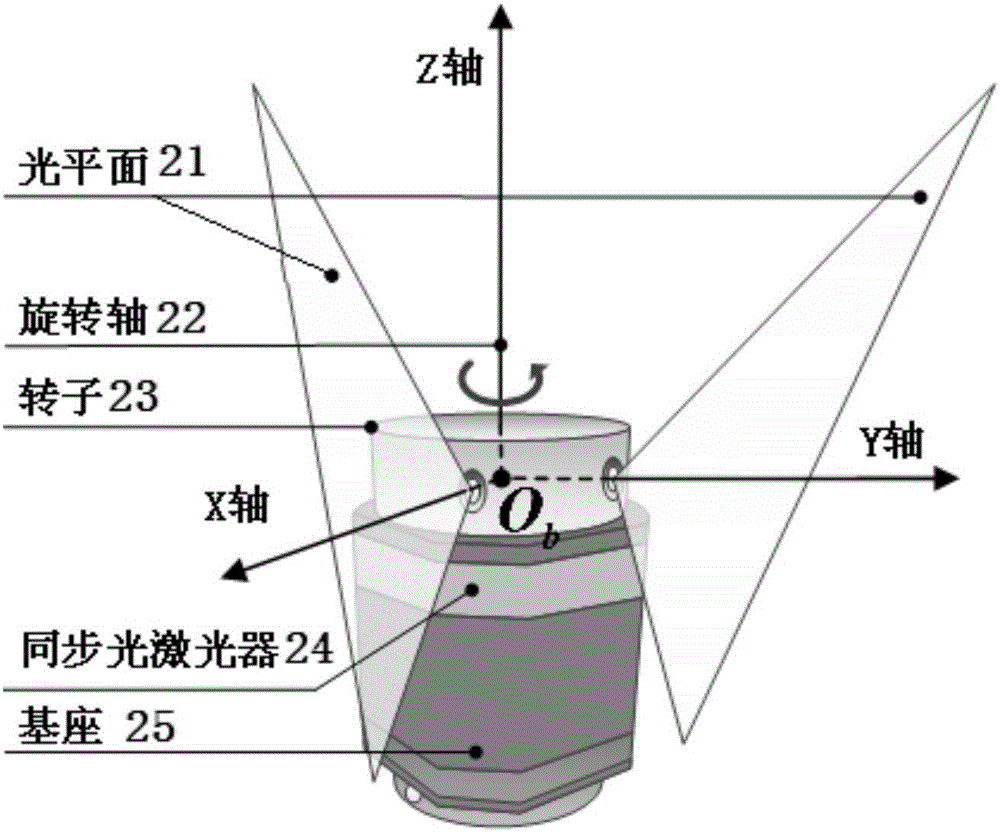
[0058] Using a small high-speed rotating platform (transmitting station) supplemented by a certain number of guiding beacons, on the premise that the precise three-dimensional coordinates of each guiding beacon in the global coordinate system are known, by measuring the relative position of the transmitting station to each guiding beacon The space scanning angle of the target is combined with the precise internal parameters of the transmitting station to complete its own pose measurement.
[0059] In the present invention, a small high-speed rotating platform (transmitting station) capable of emitting laser signals to the whole space is fixed on the body of the mobile robot. While following the movement of the robot, it continuously emits laser light signals to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More