

AVG inertial navigation method
A technology of inertial navigation and gyroscope, applied in the field of AGV inertial navigation, can solve the problems of low line requirements, easy to be affected by light, and heavy laying workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
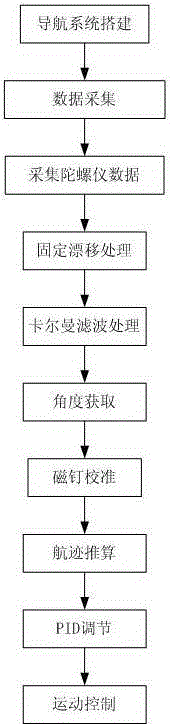
[0045] Such as figure 1 Shown, a kind of AGV inertial navigation method, it comprises following sub-steps:
[0046] S1: To build the navigation system, set the gyroscope on the AGV trolley, set the magnetic sensor on the center line of the bottom of the trolley, lay the magnetic nail on the AGV channel, and set the encoder, data processing unit and motion control unit in the control box;
[0047] S2: Data acquisition, the gyroscope collects the angular velocity of the wheel, the magnetic sensor collects the position of the magnetic nail on the waterway, the encoder acquisition unit counts the pulses of the encoder according to the external interrupt, and combines the number of pole pairs of the motor to obtain the number of rotation cycles ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More