

Switching control method of linear/nonlinear active disturbance rejection control system
A technology of active disturbance rejection control and active disturbance rejection controller, which is applied in the field of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
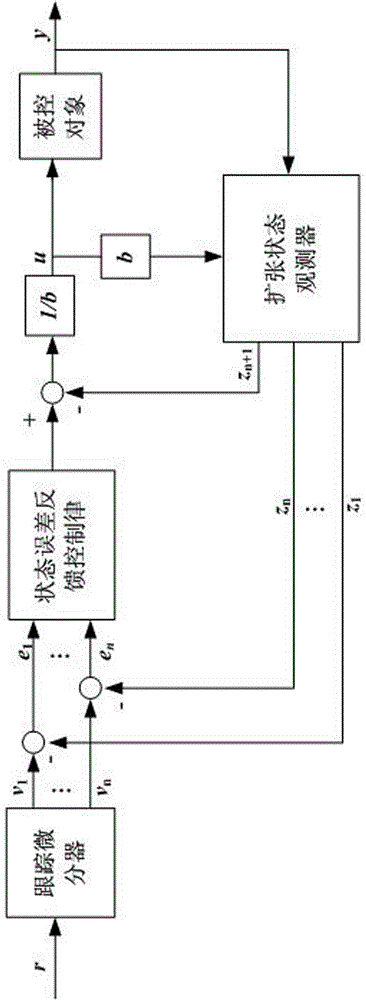
[0056] (1) Establishing an ADRC system, which includes a controlled object and an ADRC controller; the ADRC controller includes a tracking differentiator, an extended state observer and a state error feedback control law;
[0057] The input of the tracking differentiator is r; the output v of the tracking differentiator i (i=1,2,...,n) and the output z of the extended state observer i (i=1,2,...,n) is used as the input e of the state error feedback control law after subtraction comparison i ; The state error feedback control law and the output z of the extended state observer n+1 The value after the subtraction comparison is used as the first input signal of the extended state observer; the state error feedback control law and the output z of the extended state observer n+1 First do subtraction comparison, and then perform 1 / b multiplied gain, as the input signal of the controlled object; the output y of the controlled object is used as the second input signal of the expande...
Embodiment 2
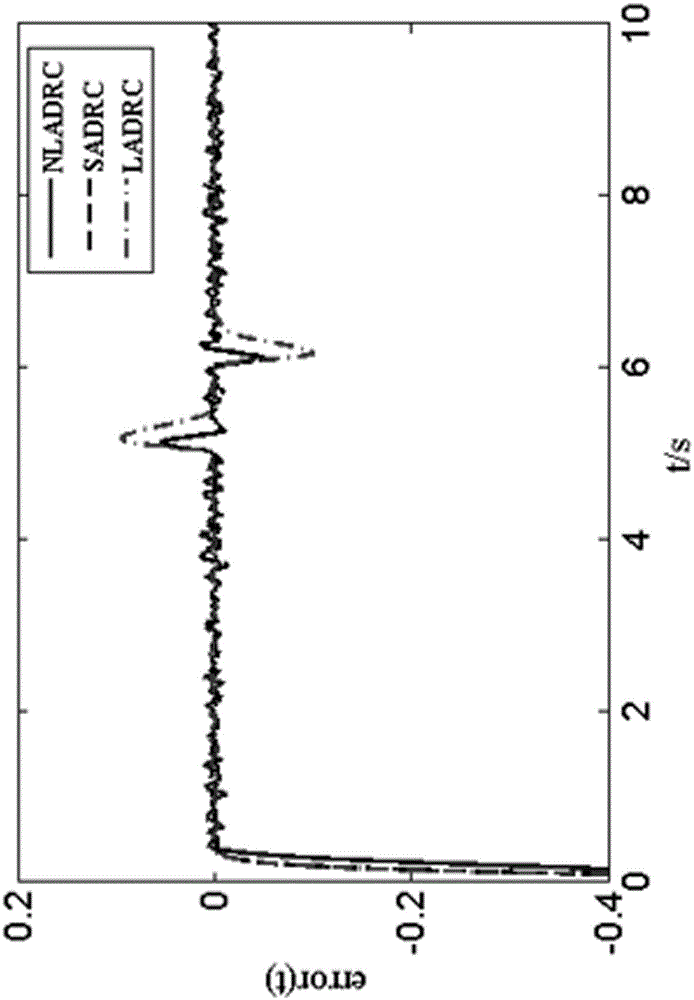
[0082] In order to reflect the tracking accuracy of each controller more clearly, consider the controlled object
[0083] x · 1 = x 2 x · 2 = 20 s i n ( ω t ) + 15 s i g n ( sin ( ω t ) ) + u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More