

A PD Control Method for Active Vibration Isolation of Stewart Platform Based on Extended State Observer
A technology of expanded state observation and active vibration isolation, applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of modeling and analysis of the operating platform, not considering the system, and limited control effects, so as to reduce the complexity and Cost, avoid arbitrariness, high control precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
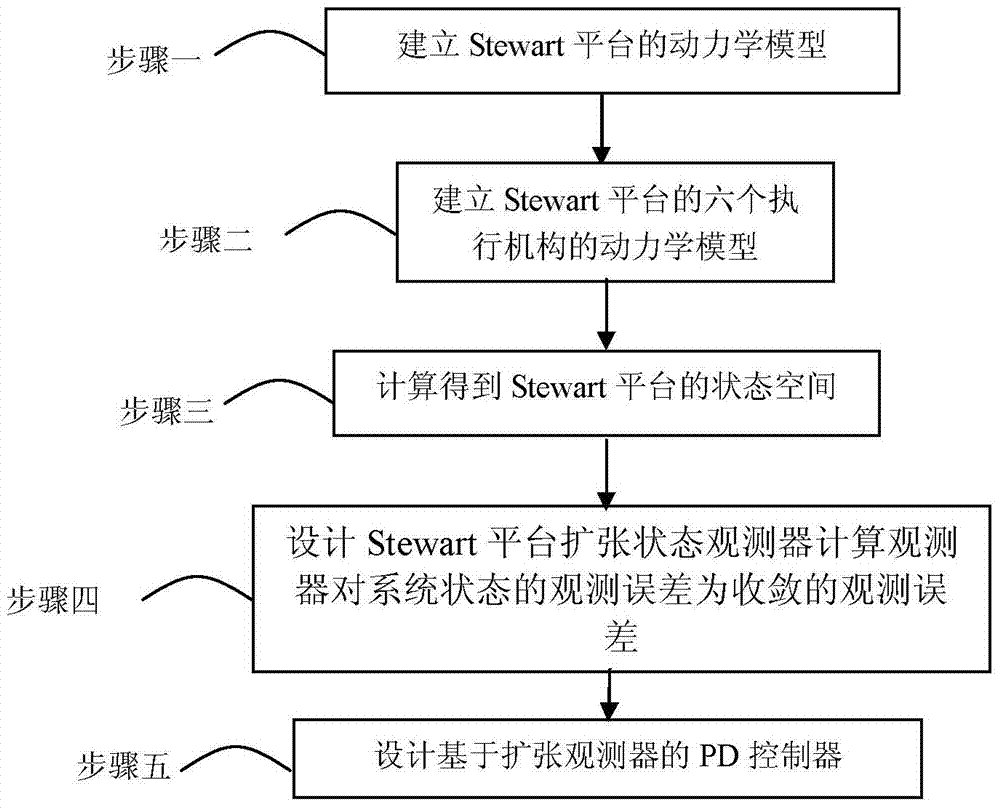
[0101] Specific implementation mode one: combine figure 2 An active vibration isolation PD control method for a Stewart platform based on an extended state observer in this embodiment is specifically prepared according to the following steps:
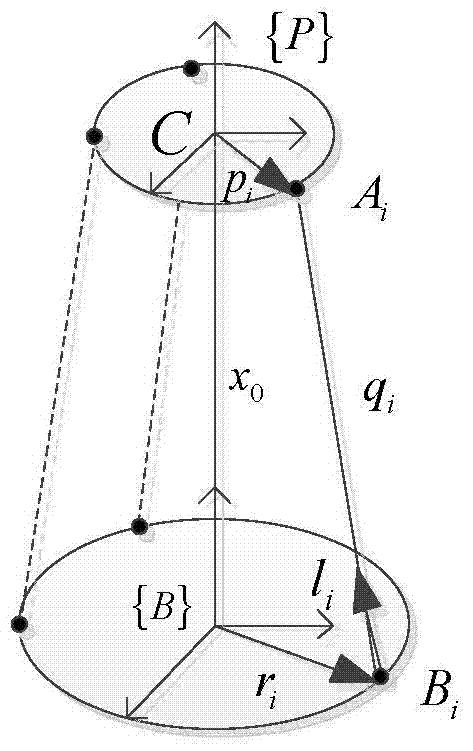
[0102] Step 1. Set the plane on the Stewart platform around the X-axis of the Stewart platform at an angle Rotate, the plane on the Stewart platform rotates around the Y axis of the Stewart platform at an angle θ, the plane on the Stewart platform rotates around the Z axis of the Stewart platform at an angle ψ, and the Stewart platform is established by the Newton-Euler (Newton Euler method) method The dynamic model is shown in formula (1):
[0103]
[0104] in, is the generalized position vector on the Stewart platform, x, y and z are the displacements of the plane on the Stewart platform on the X, Y and Z axes respectively; M∈R 6×6 is the inertia matrix of the Stewart platform; R is a real number; B∈R 6×6 is the damping matr...
specific Embodiment approach 2
[0169] Specific embodiment two: the difference between this embodiment and specific embodiment one is: in step two, L=diag([l m1 , l m2 , l m3 , l m4 , l m5 , l m6 ]), l mi is the i-th element in the inductance matrix of the voice coil motor; i=1,...,6. Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0170] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: in step two, R=diag([r m1 , r m2 , r m3 , r m4 , r m5 , r m6 ]); mi is the i-th element in the voice coil motor resistance matrix; i=1,...,6. Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More