

Motion information-based method for monocular camera to acquire depth information
A technology for acquiring depth and motion information, applied in image data processing, instrumentation, computing, etc., can solve problems such as unstable performance, low accuracy, and limited camera placement space, reducing computational complexity and hardware costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0024] A method for acquiring depth information based on a monocular camera based on motion information, including hardware and software.
[0025] Hardware part: A monocular camera is used to support shooting. The camera comes with full manual mode and manual shutter mode, and the camera is placed on a horizontal track to realize shooting in motion. The track can control the camera movement mode to move at a constant speed. Orbits can also control the precise movement of the camera.
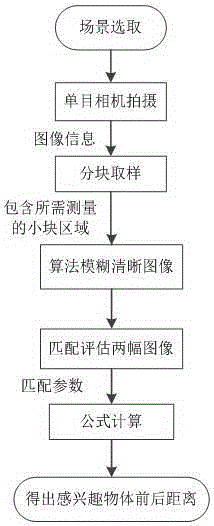
[0026] Software part: A block algorithm is required, which is used to block two images and select the small block image that needs to be calculated.
[0027] Blur algorithm, used to blur the captured clear image.
[0028] The matching algorithm is used to evaluate the matching degree to return the best matching blur matrix, and then calculate the distance between the object and the camera based on the camera imaging principle.
[0029] like figure 1 As shown, the specific steps of the method a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More