Bionic hand with five fingers based on nickel-titanium memory alloy
A nickel-titanium memory alloy and bionic technology, applied in the direction of artificial arms, etc., can solve the problems of simplicity, high cost of smart hands, and difficulty in popularization, and achieve the effects of improving grip, preventing objects from falling, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings.
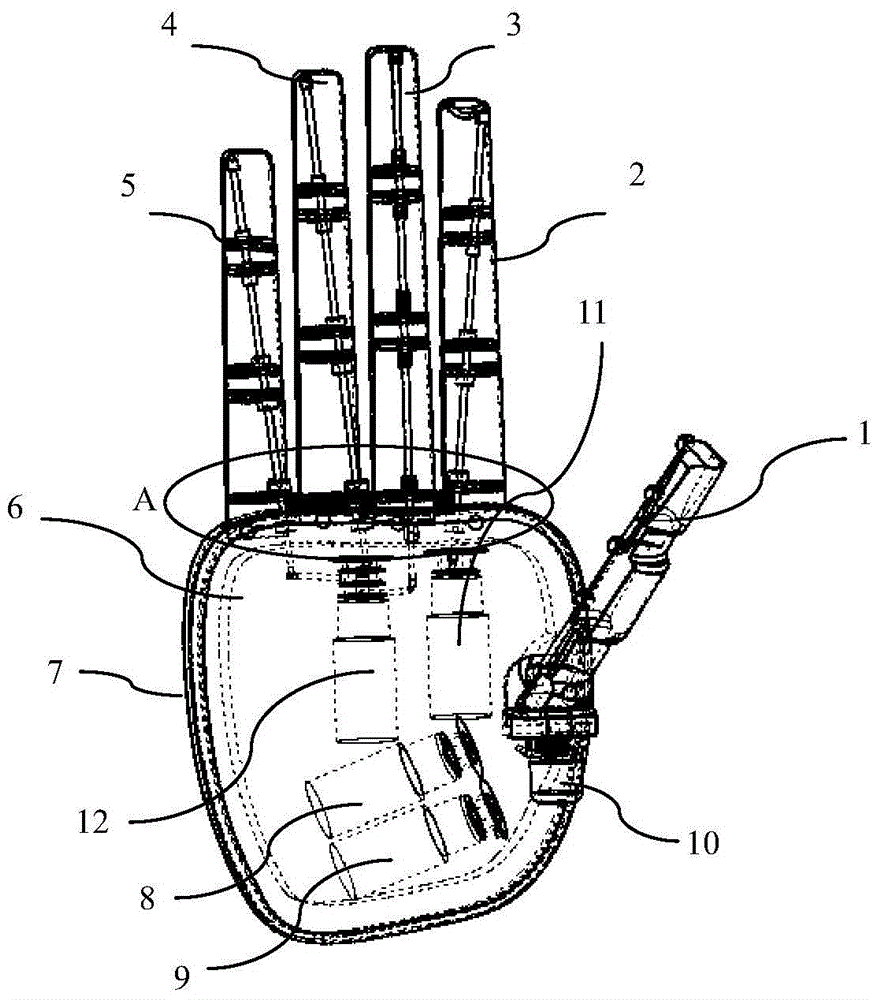
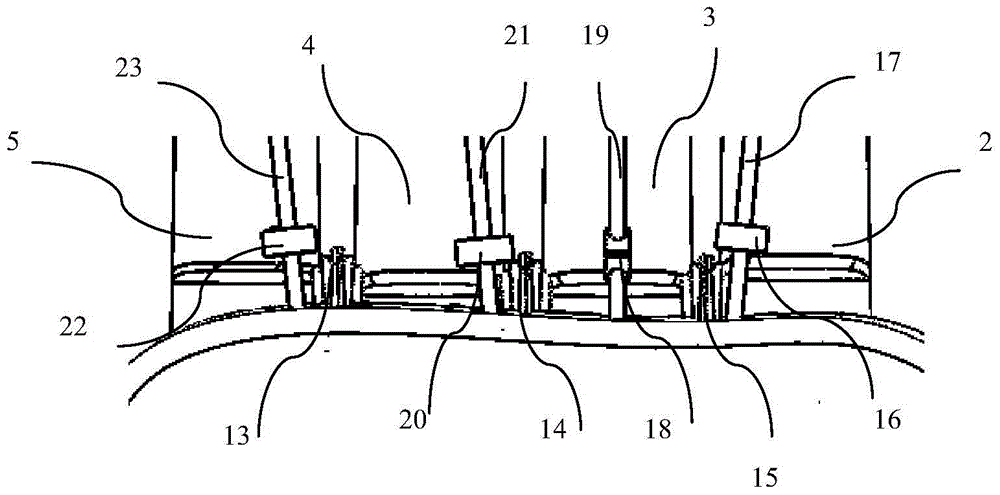
[0023] Such as Figure 1-2 As shown, the bionic five-fingered prosthetic hand based on nickel-titanium memory alloy material disclosed by the present invention includes five fingers (thumb 1, index finger 2, middle finger 3, ring finger 4, little finger 5), a hollow palm and a driving device accommodated in the palm. device, each finger is made of nickel-titanium memory alloy through partial processing. In this way, the five fingers are installed on the palm body through the finger pin shaft, and the rotation axis of the finger pin shaft is perpendicular to the palm surface of the palm; each finger is equipped with a pull wire for pulling the finger action, and the driving device controls the corresponding finger through the corresponding pull wire. Finger flexion and extension, lateral close together, rotation and other movements.
[0024]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com