

Active time-delay feedback control method for attitude adjustment of hovercraft
A technology of feedback control and hovercraft, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as unfavorable start, hovercraft vibration, hovercraft difficulty, etc., and achieve the effect of improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The following examples describe the present invention in more detail.
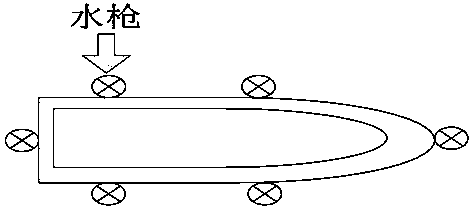
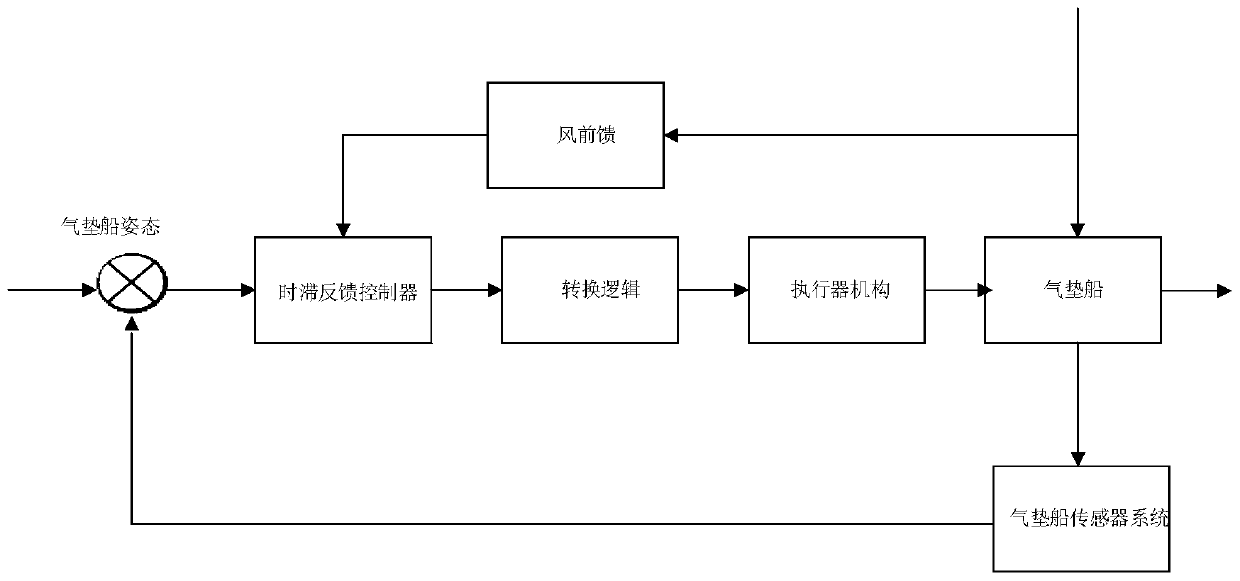
[0018] The attitude information of the hovercraft is obtained through the hovercraft sensor system, and the control signal of the controller is obtained according to the information. The signal enters the conversion logic to calculate the power required by each water gun, and finally adjusts the attitude of the hovercraft through the actuator mechanism.
[0019] 1. Establish a six-degree-of-freedom model of the hovercraft:
[0020] The six-degree-of-freedom motion model of the full-cushion lift hovercraft is:
[0021] in:
[0022] u, ——the speed in the direction of X-axis, ξ——the position on the X-axis
[0023] v, ——the speed in the Y-axis direction, η——the position on the Y-axis
[0024] w, ——the speed in the Z-axis direction, ζ——the position on the Z-axis
[0025] p, — the angular velocity of the movement around the X axis, ——Attitude angle around the X axis
[0026] q, ——The an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More