

Vision-based intelligent vehicle transverse control method
A technology of intelligent vehicle and lateral control, applied in the field of intelligent vehicles, can solve the problems of radar mutual interference and the inability of radar to accurately locate the vehicle ahead, and achieve the effect of removing the interference of vehicles in the reverse lane.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0008] Referring to the accompanying drawings, through the description of the embodiments, the specific embodiments of the present invention include the shape, structure, mutual position and connection relationship of each part, the function and working principle of each part, and the manufacturing process of the various components involved. And the method of operation and use, etc., are described in further detail to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
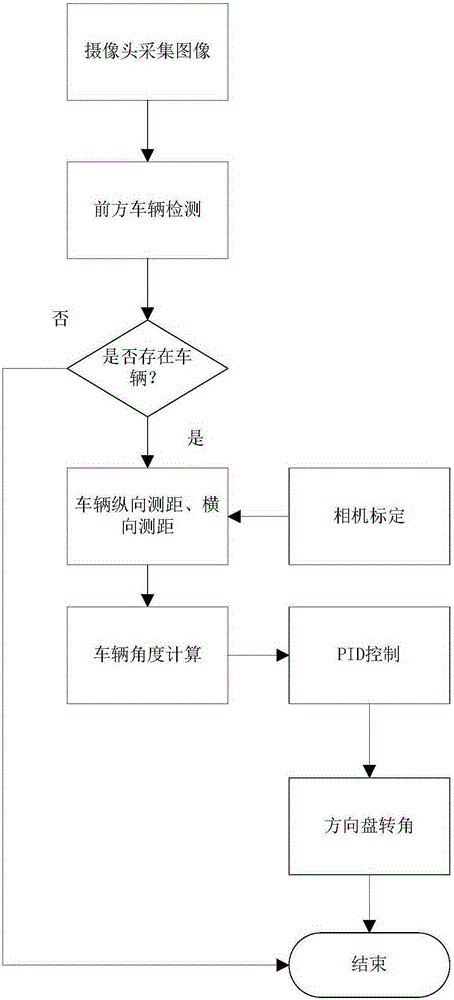
[0009] A vision-based intelligent vehicle lateral control method, the method comprises the following steps: Step 1, camera captures images; Step 2, according to the images collected by the camera in real time, the image of the vehicle ahead is collected, and computer vision technology is used to detect whether the vehicle ahead exists; Step 3 1. Longitudinal and lateral distance measurement of the veh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More