

First-person immersive unmanned aerial vehicle driving system realized by virtue of virtual reality and binocular vision technology and driving method
A binocular vision and virtual reality technology, applied in the field of drones, can solve problems such as mistakes and the inability of the drone driving system to grasp the real-time flight status in real time, so as to achieve the effect of direct control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
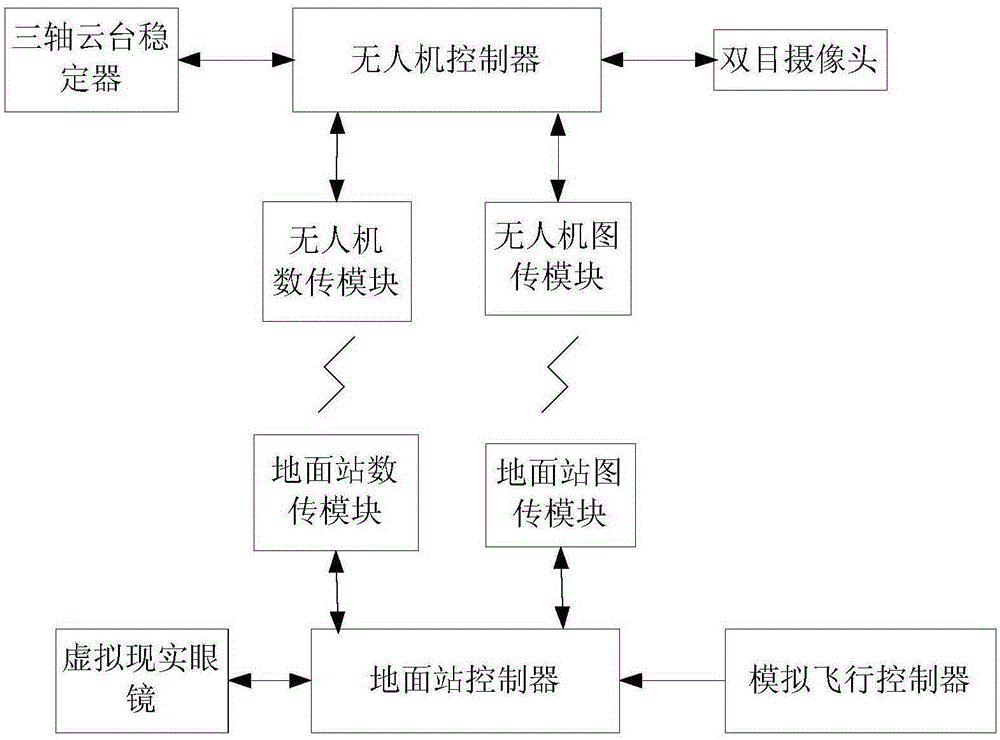
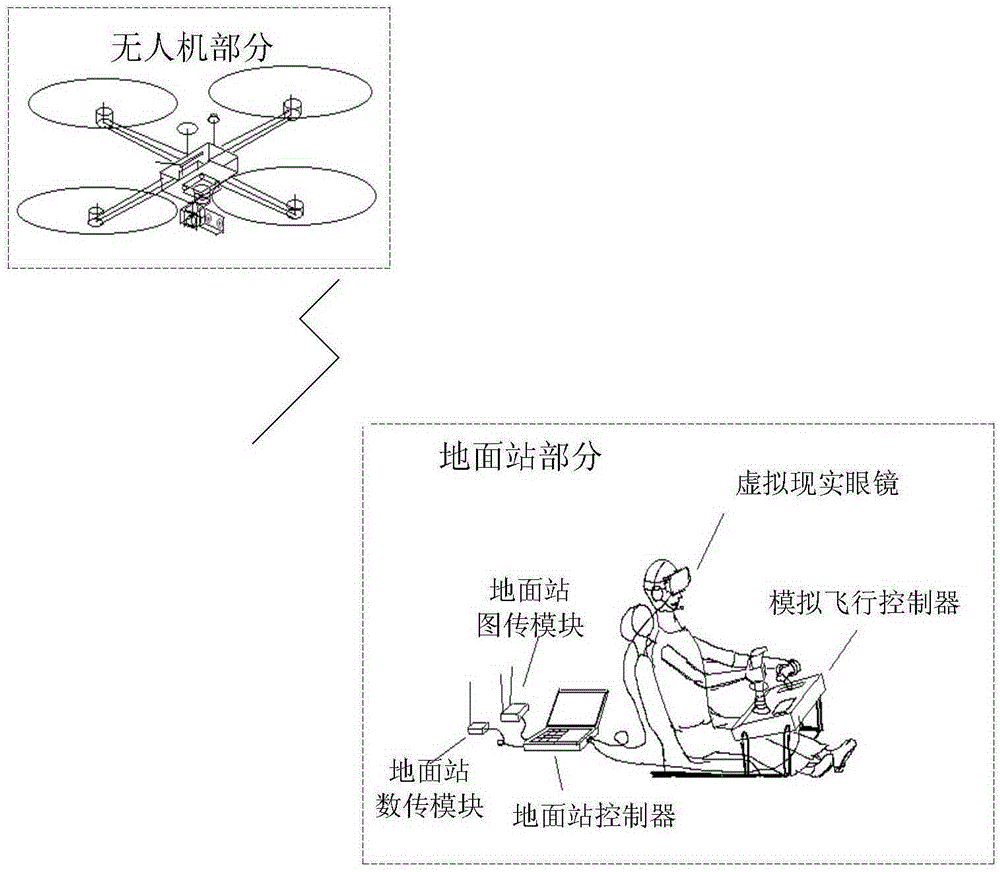
[0057] Specific implementation mode one: combine figure 1 with figure 2Describe this embodiment, the first-person immersive UAV driving system realized by means of virtual reality and binocular vision technology described in this embodiment, the system includes a UAV part and a ground station part; the UAV part Including three-axis gimbal stabilizer, binocular camera, UAV image transmission module, UAV data transmission module and UAV control module;
[0058] The binocular camera is used to collect images of the surrounding environment of the drone;
[0059] The UAV image transmission module is used to return the images collected by the binocular camera;
[0060] The drone data transmission module is used to receive the Euler angle of the head relative to the simulated cockpit orientation and the control command of the drone's flight status, and is used to return the flight status information of the drone;
[0061] The UAV controller is used to calculate the received Euler...
specific Embodiment approach 2
[0083] Specific embodiment two: the first-person immersive UAV driving method realized by means of virtual reality and binocular vision technology described in this embodiment, the method includes the embedded program in the UAV and the computer embedded program in the ground station, the described The embedded program in the UAV includes the following steps:
[0084] Steps for collecting images of the surrounding environment of the drone using the binocular camera;
[0085] Steps for returning the image collected by the binocular camera;
[0086] A step for receiving the Euler angle of the head relative to the orientation of the simulated cockpit and the control command of the flight state of the UAV, and for returning the flight state information of the UAV;
[0087] It is used to calculate the Euler angle of the received head relative to the orientation of the simulated cockpit to obtain the action angle command, and is also used to control the flight state of the UAV acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More