

Vehicle detection system based on binocular stereo vision and method thereof
A technology for binocular stereo vision and vehicle detection, applied in the field of vehicle detection systems based on binocular stereo vision, can solve problems such as low accuracy, poor real-time performance and adaptability of vehicle detectors, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in further detail below in conjunction with the accompanying drawings.
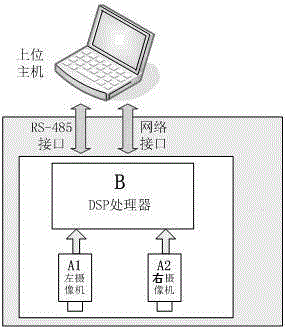
[0066] Such as figure 1 As shown, a vehicle detection system based on binocular stereo vision includes a binocular parallel camera, a DSP processor, a communication module and a host computer. The binocular parallel camera includes a left camera A1 and a right camera A2, which are respectively processed with the DSP The DSP processor is connected with the upper host through the communication module for data communication and real-time digital video transmission.
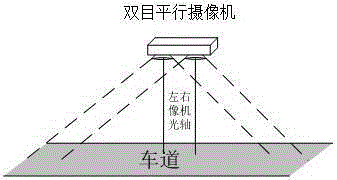
[0067] Such as figure 2 As shown, when the detection system is installed, it is located above the road, installed from top to bottom, the parameters of the left and right cameras are consistent, the optical axes are parallel, and perpendicular to the ground; the baseline direction of the two cameras is parallel to the lane.
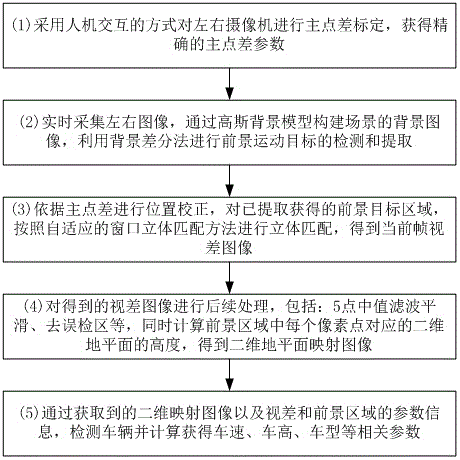
[0068] Such as image 3 , Figure 4 As shown, a vehicle detection met...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More