

Quadruped robot biped support phase force hybrid force control method
A quadruped robot, hybrid control technology, applied in two-dimensional position/channel control, attitude control, adaptive control, etc., can solve the problem of relatively large driver stiffness and position control, and achieve good theoretical value and engineering significance, strong Accelerated performance, improved adaptability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
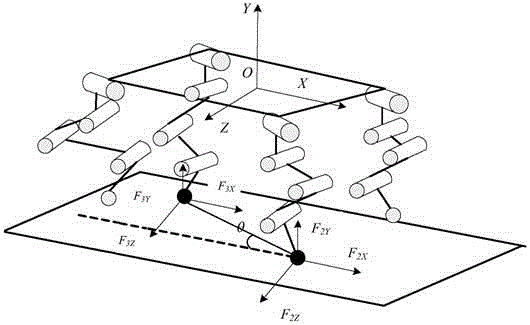
[0028] The method of the present invention is mainly applicable to quadruped robots. Such as figure 1 Shown is the system structure of a quadruped robot, which consists of a body and four legs. Each leg contains a hip lateral rotation joint and three forward rotation joints (hip front joint, knee joint and ankle joint). Each joint is driven by a hydraulic drive and is equipped with displacement and force sensors to detect the drive length and driving force. The foot end of each leg is equipped with a three-dimensional force sensor, which is used to detect the contact force information between the foot end of the robot and the environment, and detect the pose information of the robot in the inertial system through the IMU. The above-mentioned quadruped robot has the following mechanical structural characteristics: (1) the center of g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More