

GEO-UAV Bi-SAR route planning method based on differential evolution
A GEO-UAV, path planning technology, applied in the field of radar, can solve the problem that bistatic SAR path planning cannot be applied, and UAV imaging performance is not considered.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
[0073] The present invention mainly uses the method of simulation experiment to verify, and all steps and conclusions are verified by simulation in Matlab2013.
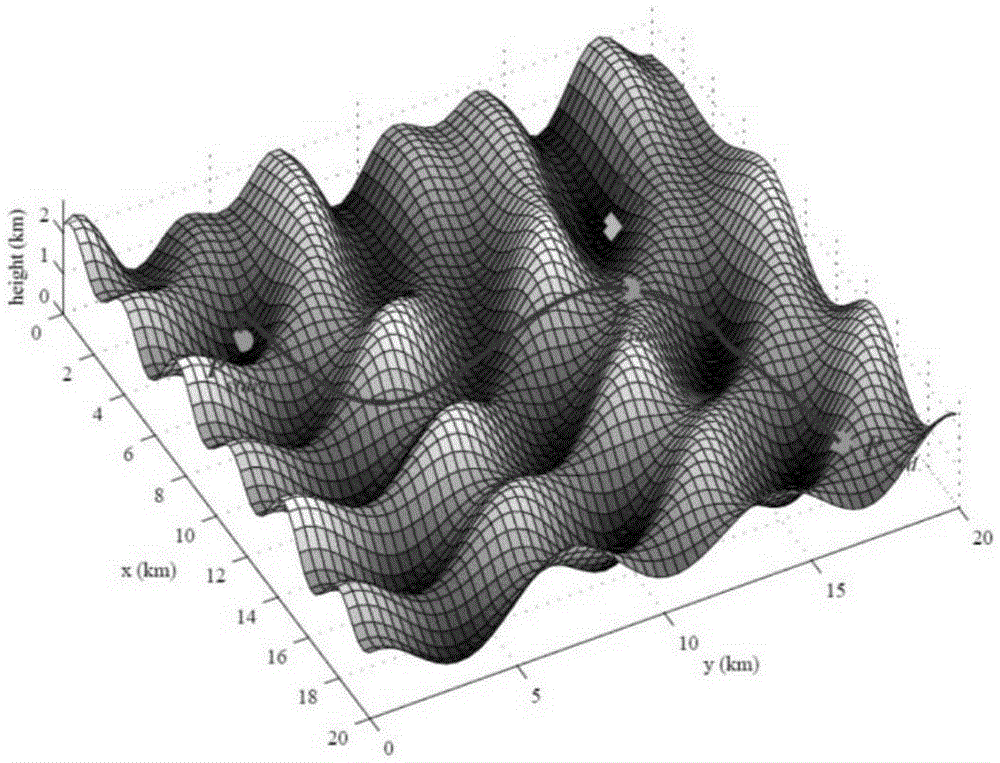
[0074] Step 1: Generate 3D simulated terrain according to formula (1). In order to simulate the real terrain height and surface, the following terrain parameters are selected: a, b, e, g=1, c, d, f=1.8. The two-dimensional grid spacing of the terrain is 0.2km, and the total length is 20km. Then the terrain height information matrix is expressed as Z(x,y).
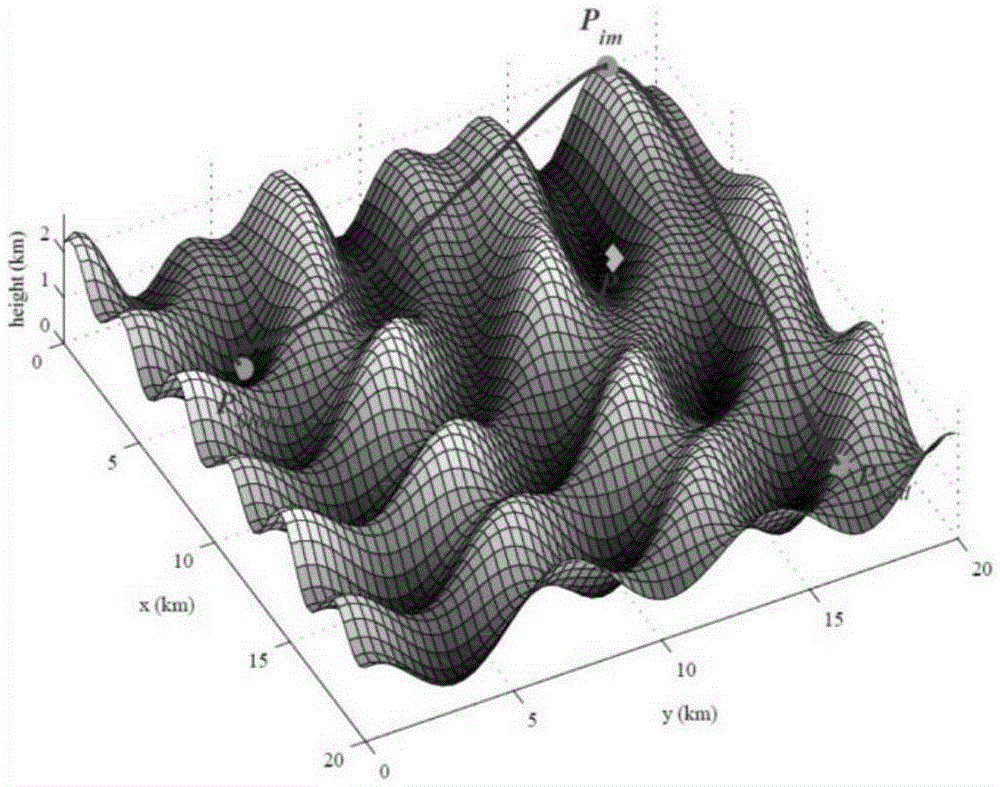
[0075] Step 2: Path modeling of UAV receiving station. According to formula (2), the UAV receiving station path is modeled as a set of control point coordinates, x=((x 1 ,y 1 ,z 1 ),(x 2 ,y 2 ,z 2 ),...,(x n ,y n ,z n )), in the simulation analysis, set the number n of UAV path control points to 9, where the first point is the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More