

Three-freedom-degree controllable mechanical manipulator
A manipulator and mechanical technology, applied in the field of manipulators, can solve the problems of small spatial positioning range, inability to flexibly grasp objects in large spaces, complex structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
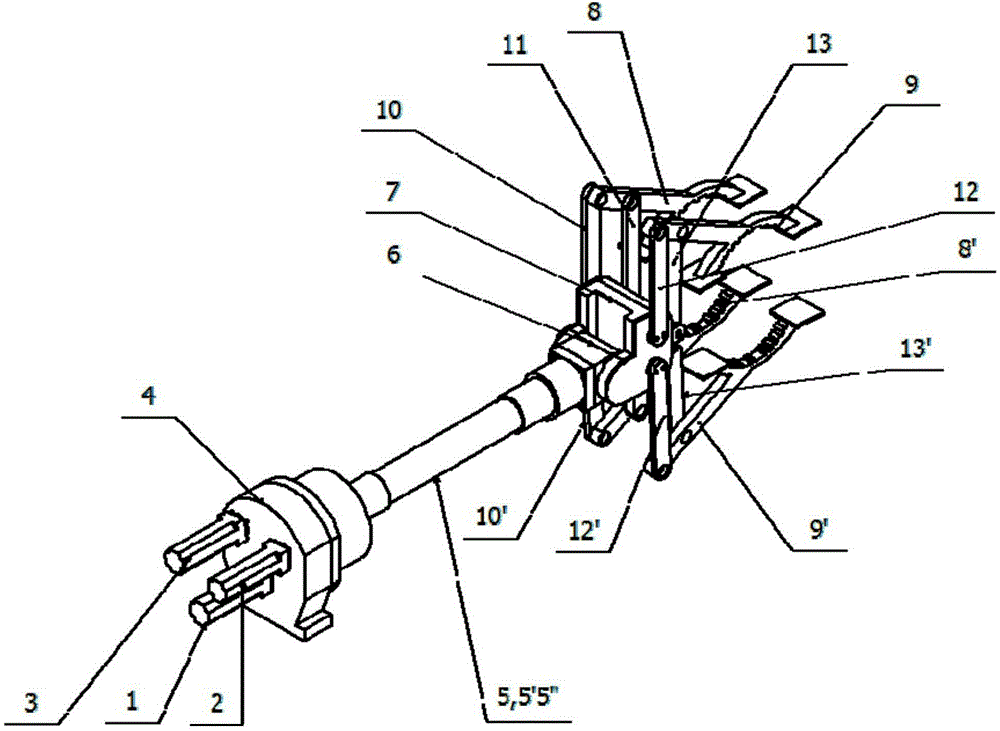
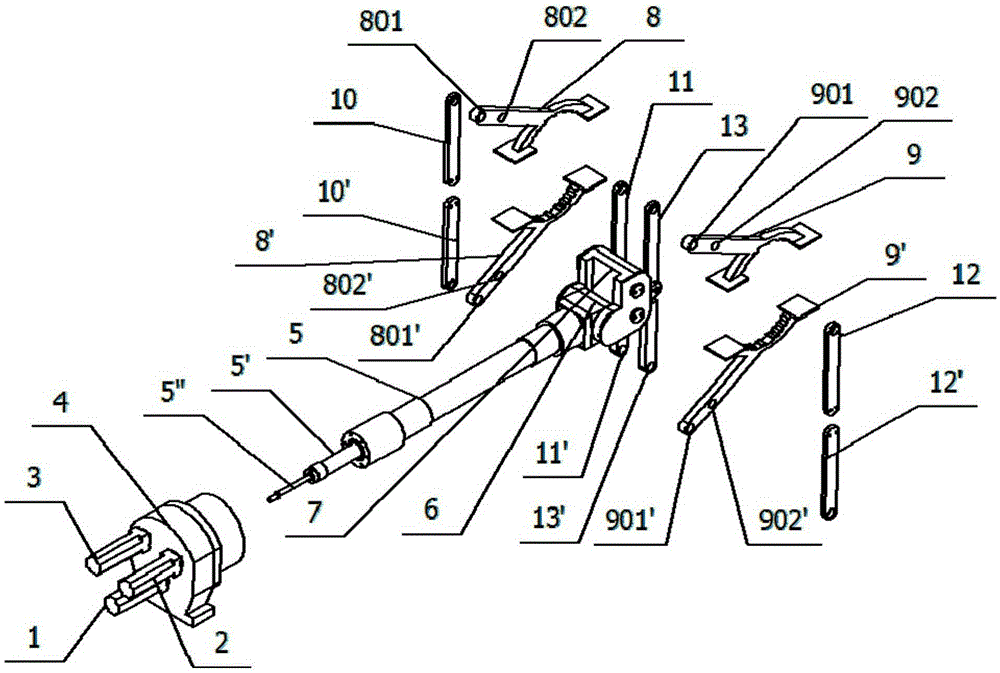
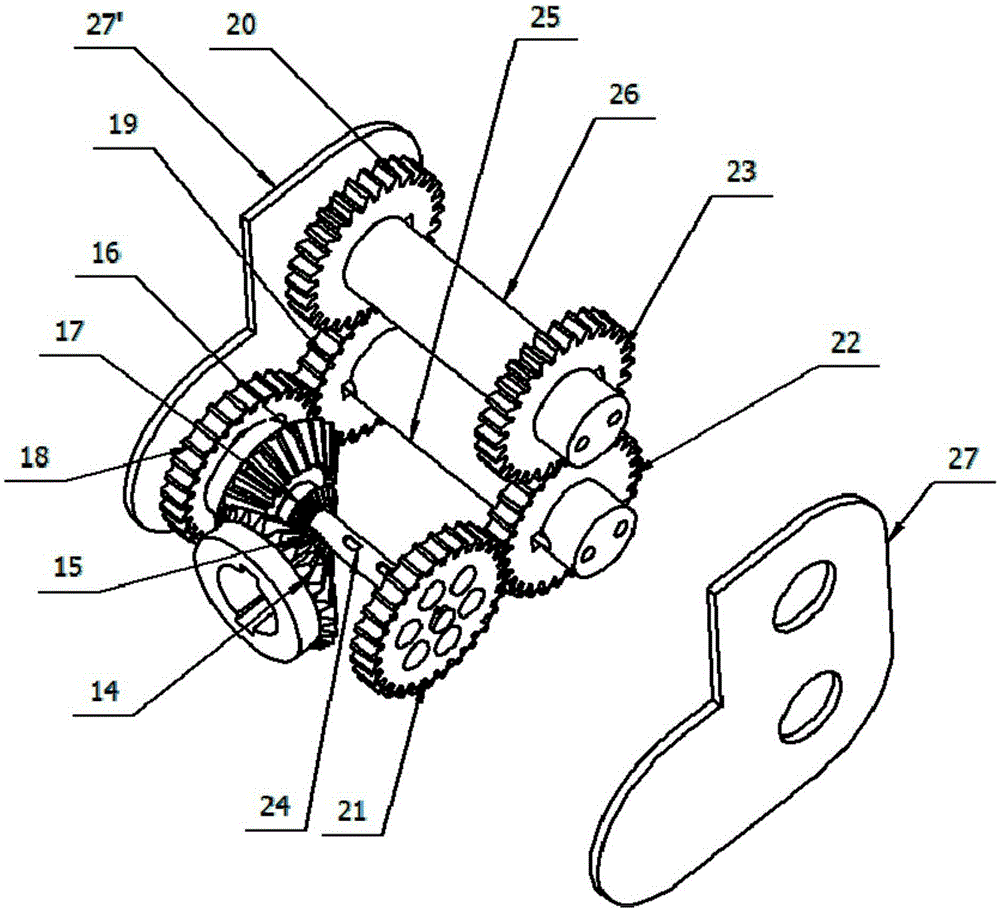
[0022] Such as Figure 1~8 As shown, by manipulating the first controllable motor 1, the manipulator head can be rotated by 360° through the first shaft 5; by manipulating the second controllable motor 2, the first main and driven bevel gears 14, 16. It can realize the 180° rotation of the manipulator head up and down; control the third controllable motor 3, drive the second main and driven bevel gears 15 and 17 through the third shaft 5", drive the first short shaft 24, and then drive the second short shaft 24 respectively. One, the second, the third driven gear 18,19,20 and the 4th, the 5th, the 6th driven gear 21,22,23 rotate, drive the second, the 3rd minor shaft 25,26 to rotate respectively, then drive The first to eighth rockers swing to realize the clamping movement of the first to fourth jaws.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More