Unmanned plane autonomous landing guidance method combining monocular vision and laser ranging
A technology of laser ranging and autonomous landing, which is applied in the directions of measuring devices, navigation computing tools, electromagnetic wave re-radiation, etc., can solve the problems of poor precision and achieve the effects of high precision, wide range and stable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
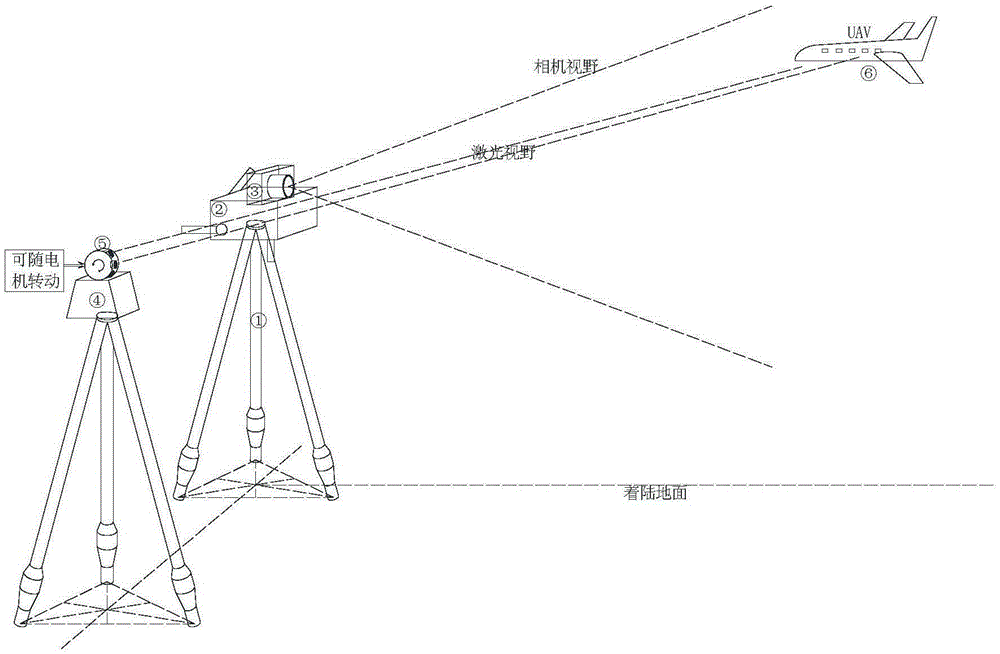
[0041] refer to Figure 1-2 . The specific steps of the UAV autonomous landing guidance method combined with monocular vision and laser ranging in the present invention are as follows:
[0042] 1. Installation and placement of equipment.
[0043] First of all, according to the target space field of view to be positioned, select the placement position of the tripod ① in the experimental environment, choose a flat place as the placement location of the tripod, and fix the horizontal stage ② that can be adjusted independently in three dimensions on the tripod; Then assemble the camera lens ③ and install it on the horizontal turntable; finally, place the laser distance measuring device ⑤ installed on the rotating motor ④ on the side near the tripod and at the same height as the camera, generally within 1 meter of the camera. Then test the laser rangefinder to make sure it is working properly.
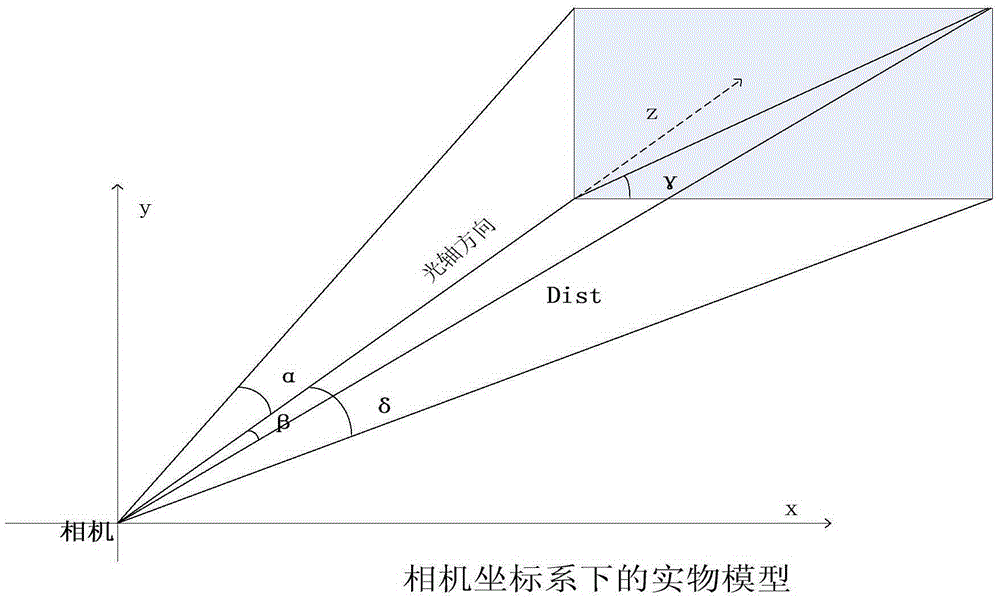
[0044] 2. Attitude adjustment of camera and laser distance measuring device.
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com