

Self-locking abduction-adduction mechanism for thumb of dexterous robot hand
A hand thumb and robot technology, applied in the field of self-locking abduction and adduction mechanism, can solve the problems such as difficult to realize the movement function of human hand to palm, and achieve the effects of miniaturization design and heat dissipation, easy maintenance and high integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
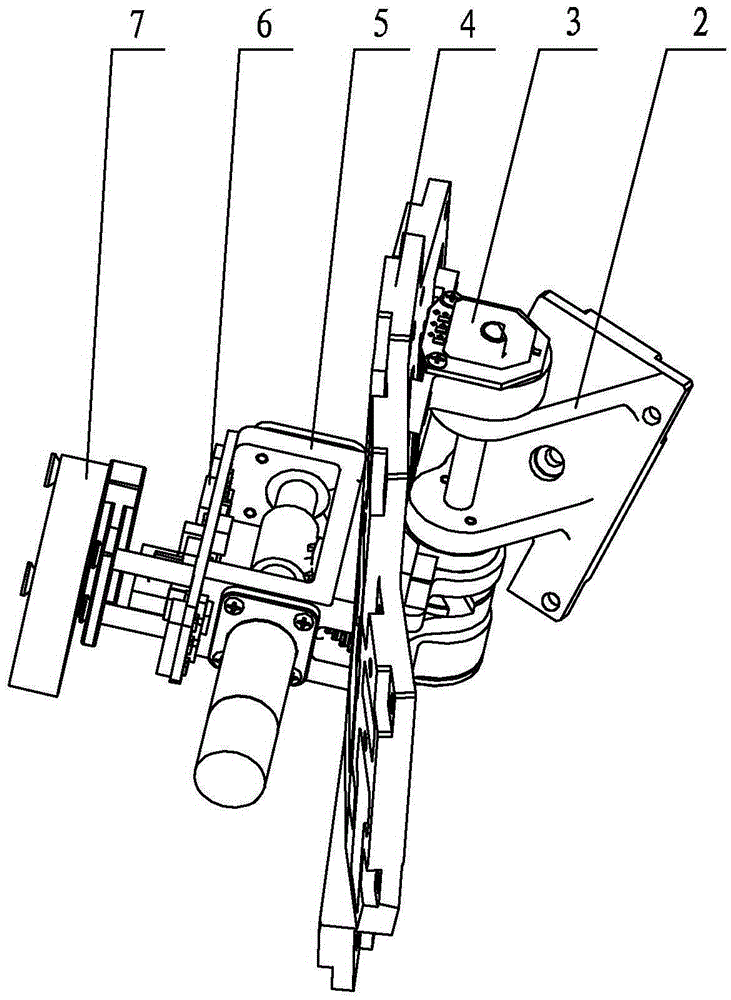
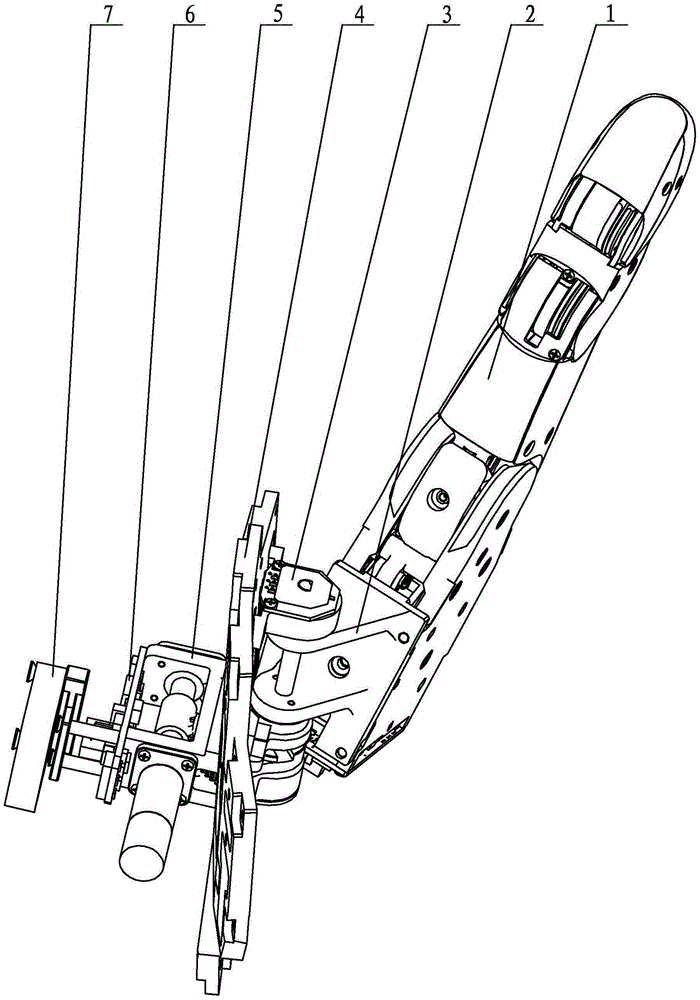
[0022] Embodiment 1: Combining Figure 1 to Figure 12 Describe this embodiment in detail, this embodiment comprises thumb support seat 2, worm gear and worm transmission mechanism 5, absolute position sensor 3, drive circuit board 6 and palm board frame 4, and described worm gear and worm transmission mechanism 5 is arranged on the palm board frame 4 On one side, a driving circuit board 6 is arranged on the worm and gear transmission mechanism 5, and the thumb support seat 2 is located on the other side of the palm plate frame 4, and an absolute position sensor 3 is arranged on the palm plate frame 4;
[0023] The worm and gear transmission mechanism 5 includes a motor 5-1, a reducer 5-2, a worm 5-9, a worm wheel 5-7, a worm shaft 5-17, an integral box 5-5 and an auxiliary base 5-20, The auxiliary base 5-20 is arranged side by side with the integral box body 5-5 and both are fixedly installed on the palm board frame 4, and the motor 5-1, the reducer 5-2 and the worm 5-9 are ar...
specific Embodiment approach 2
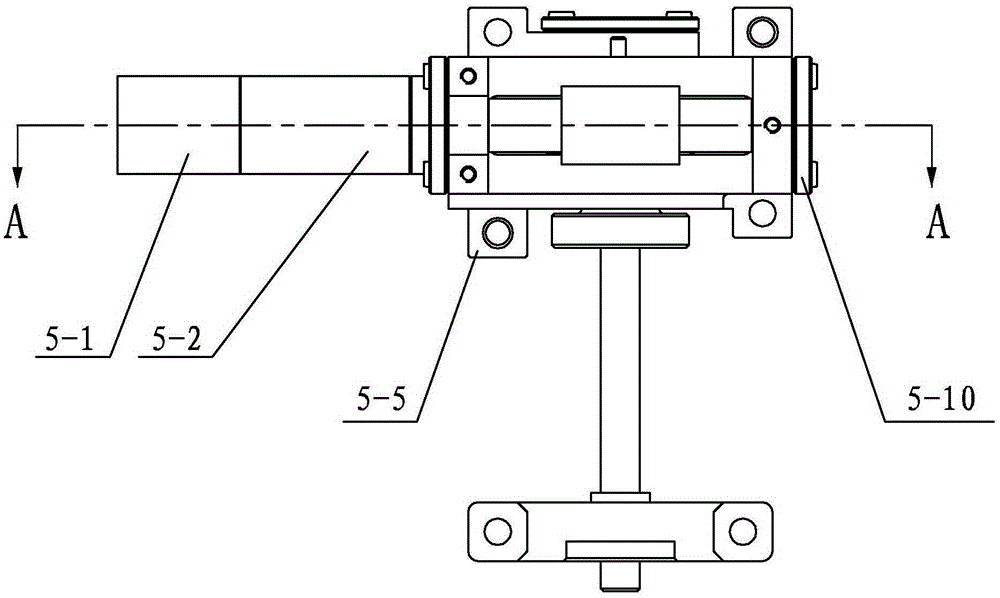
[0029] Specific implementation mode two: combination figure 1 , figure 2 , image 3 and Figure 4 Specifically explain this embodiment, the worm gear transmission mechanism 5 in this embodiment also includes a reducer end cover 5-3, a positioning sleeve 5-4, two worm shaft bearings 5-6 and a worm end cover 5-10, The reducer 5-2 is threadedly connected with the reducer end cover 5-3, the reducer end cover 5-3 is fixedly installed on the integral box body 5-5, and one end of the worm 5-9 passes through the type hole It is connected with the output shaft of the reducer 5-2, the other end of the worm 5-9 is connected with the integral box 5-5 through two worm shaft bearings 5-6, and the worm end cover 5-10 is fixedly installed On the integral casing 5-5.
[0030] In this embodiment, the end cover 5-3 of the reducer is fixed and installed on the integral box body 5-5 through four M1.6 flat head screws, and one end of the worm 5-9 passes through the hole and the output shaft of...
specific Embodiment approach 3
[0031] Specific implementation mode three: combination figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 and Figure 8Specifically explaining this embodiment, the worm gear transmission mechanism 5 in this embodiment also includes a main bearing 5-11, a retaining ring 5-12, a connecting end cover 5-13, a positioning sleeve 5-14, and a main bearing 2 5 -16. Adjusting gasket 5-15, positioning bushing 5-18 and auxiliary bearing 5-19, the first main bearing 5-11 and the second main bearing 5-16 are all set on the worm gear shaft 5-17, and the The worm gear shaft 5-17 is connected with the integral casing 5-5 through the main bearing one 5-11 and the main bearing two 5-16 successively, and the said main bearing one 5-11 is sleeved with a retaining ring 5-12. Main bearing one 5-11 is fixedly installed on the worm gear shaft 5-17 through the retaining ring 5-12, and the end cover 5-13 is fixedly installed on the integral box body 5-5, and the worm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More